Автоматическая проверка
Образ Клевера включает в себя средство автоматической проверки корректности настроек и работы всех подсистем квадрокоптера Клевер — selfcheck.py.
Для запуска наберите в консоли Raspberry Pi:
rosrun clover selfcheck.py
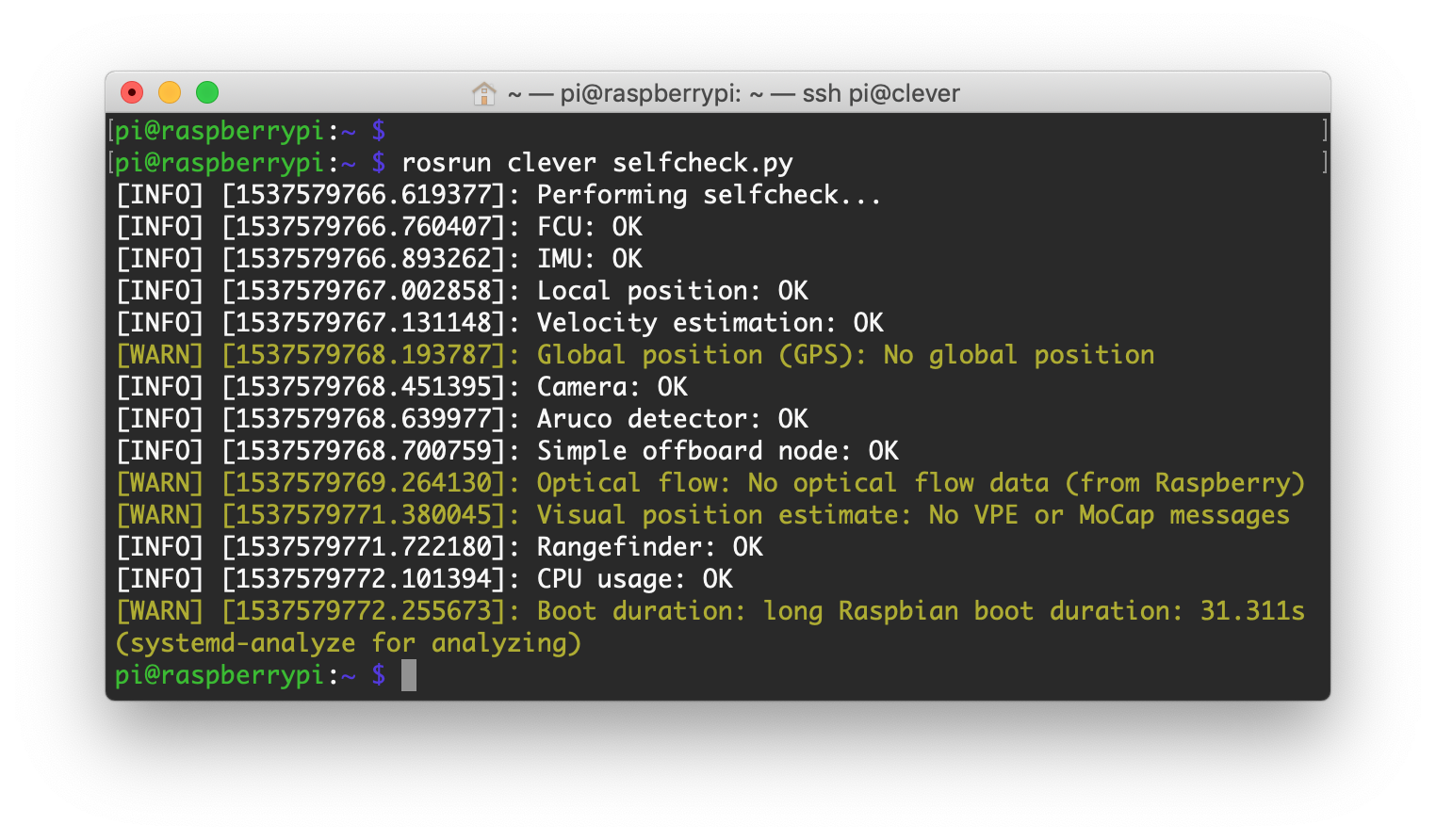
Описание некоторых проверок:
- FCU – проверка корректности соединения с полетным контроллером;
- IMU – проверка корректности данных с IMU;
- Local position – наличие локальной позиции дрона;
- Velocity estimation – оценка скоростей дрона (запрещено выполнять автономный взлет при ошибках в этой проверке!);
- Global position (GPS) – наличие глобальной позиции (требуется GPS);
- Camera – корректная работа камеры Raspberry.
- ArUco – проверка работы распознавания ArUco-маркеров.
- VPE – проверка правильности работы VPE.
- Rangefinder – проверка работы дальномера.
- RPi health – проверка состояния бортового компьютера.
- CPU usage – проверка загруженности процессора бортового компьютера.
ВНИМАНИЕ
Обращайте пристальное внимание на предупреждения, отмеченные строкой WARN. При необходимости, обращайтесь в Техподдержку Copter Express.