Калибровка камеры
Калибровка камеры может значительно повысить качество работы модулей, связанным с компьютерным зрением: распознавание ArUco-маркеров и Optical Flow.
При калибровке камеры подбираются параметры, наиболее хорошо описывающие конкретный установленный объектив. Данные параметры включают в себя фокусные расстояния, расположение точки principal point (которое зависит от того, насколько ровно по центру установлен объектив), коэффициенты дисторсии D. Подробнее про использующуюся модель искажений камеры можно прочитать в документации OpenCV.
Существует несколько инструментов, которые позволяют откалибровать камеру и прописать вычисленные параметры в систему. Обычно, они используют калибровочные изображения: "шахматные доски" (Chessboard), а так же комбинации шахматной доски и сетки ArUco-маркеров (ChArUco).
ROS-пакет camera_calibration
Основной туториал: http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration.
Для калибровки камеры с использованием ROS-пакета camera_calibration необходим компьютер с установленным ОС GNU/Linux и ROS Melodic.
Используя Терминал, установите на компьютер пакет
camera_calibration:sudo apt-get install ros-melodic-camera-calibrationСкачайте калибровочную доску –
chessboard.pdf. Распечатайте доску на принтере либо выведите ее на экран компьютера.Подключитесь к Wi-Fi Клевера.
Запустите калибровку (на компьютере):
ROS_MASTER_URI=http://192.168.11.1:11311 rosrun camera_calibration cameracalibrator.py --size 6x8 --square 0.108 image:=/main_camera/image_raw camera:=/main_cameraNote Вместо значения 0.108 укажите реальный размер квадрата на распечатанной доске или на экране (в метрах). Например, значение 0.03 будет соответствовать 3 см.
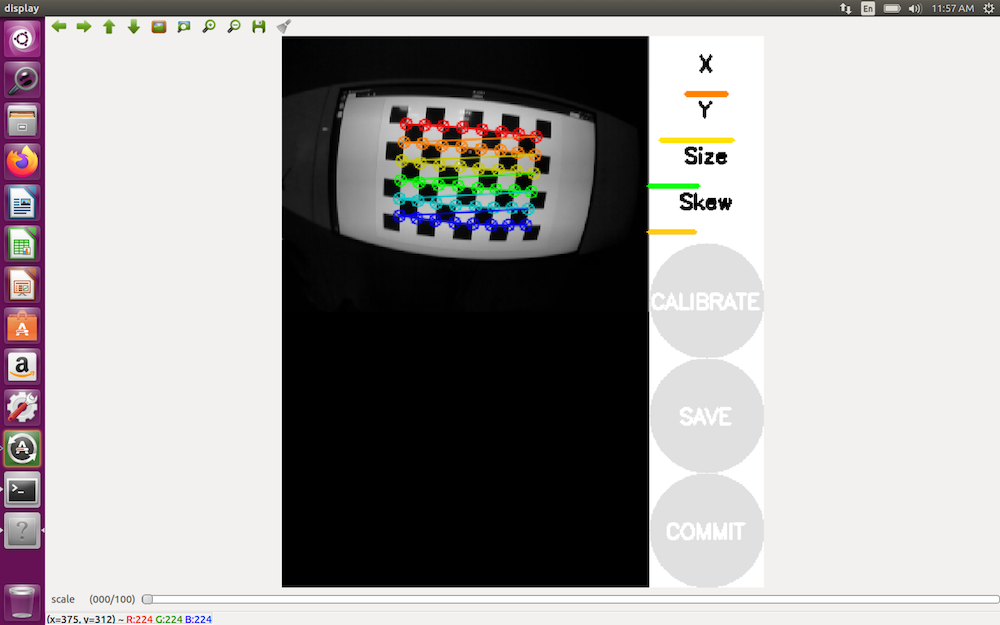
Когда программа для калибровки запустится, начните перемещать дрон таким образом, чтобы калибровочная доска попадала в кадр под разными углами.
- Перемещайте калибровочную доску в левый, правый, верхний и нижний торец кадра.
- Вращайте калибровочную доску вокруг всех 3-х осей.
- Отдаляйте и приближайте камеру к калибровочной доске.
Нажмите кнопку CALIBRATE, когда она станет активной. Процесс вычисления параметров калибровки займет несколько минут.
Когда калибровка завершится, в терминале вы увидите полученные параметры. В окне отобразится изображение с выправленными искажениями. При успешной калибровке все реальные прямые линии должны остаться прямыми на полученном изображении.
Нажмите COMMIT, чтобы сохранить полученные параметры калибровки. Результат будет записан в файл калибровки основной камеры Клевера:
/home/pi/catkin_ws/src/clover/clover/camera_info/fisheye_cam.yaml.