Подключение QGroundControl по Wi-Fi
Возможны контроль, управление, калибровка и настройка полетного контроллера квадрокоптера с помощью программы QGroundControl по Wi-Fi. Для этого необходимо подключиться к Wi-Fi сети clover-xxxx.
Подключение
По умолчанию на Клевере настроена возможность подключения QGroundControl по протоколу TCP.
- На первой вкладке QGroundControl выберите меню Comm Links.
- Нажмите кнопку Add, чтобы добавить новое подключение.
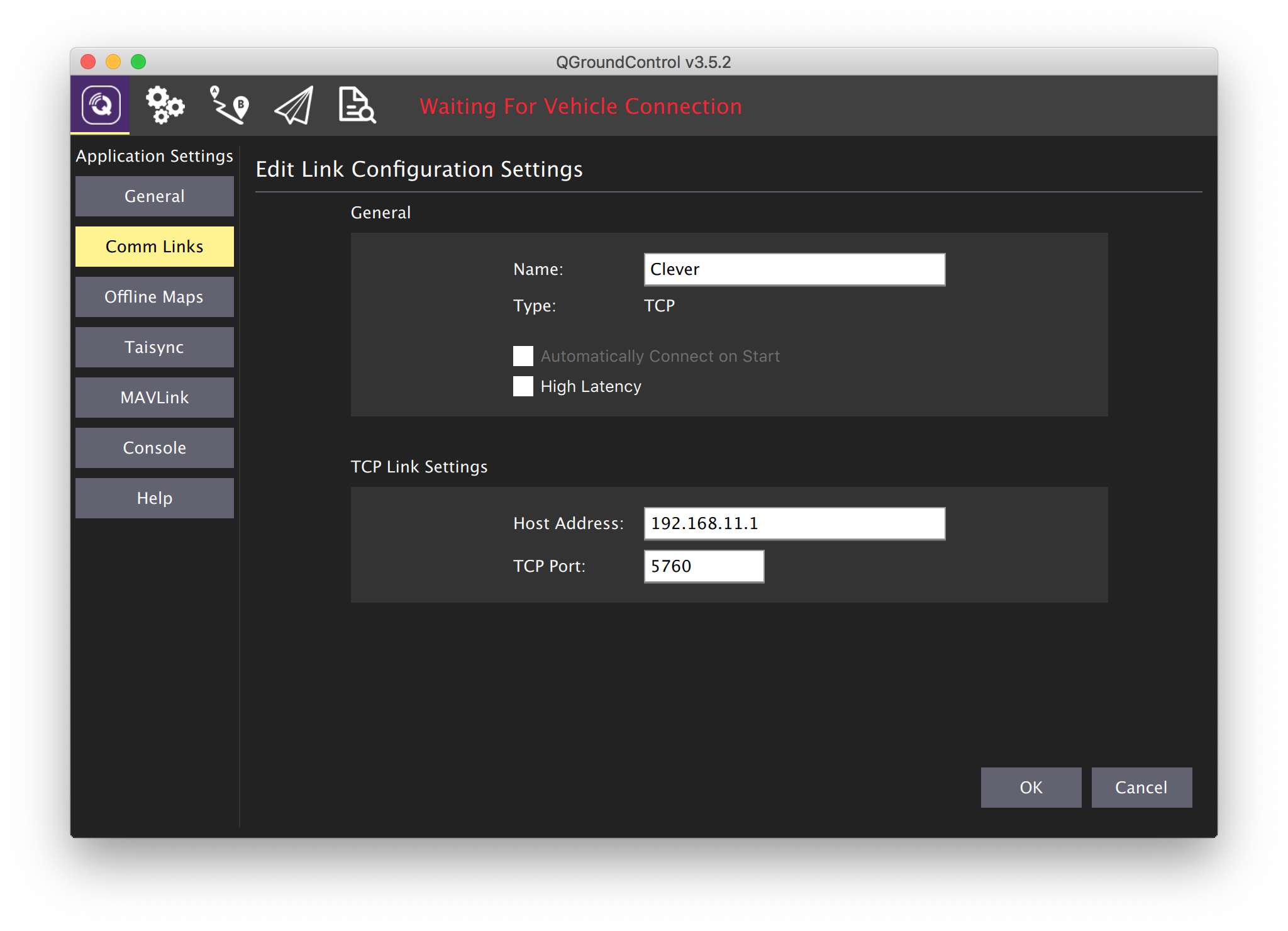
- Введите параметры подключения:
- Name: Clover.
- Type: TCP.
- Host Address: 192.168.11.1.
- TCP Port: 5760.
- Нажмите OK для сохранения параметров.
- Выберите созданное подключение и нажмите Connect.
UDP
Также возможна настройка подключения по протоколу UDP. Для выбора различных вариантов подключения по UDP необходимо отредактировать параметр gcs_bridge в launch-файле /home/pi/catkin_ws/src/clover/clover/launch/clover.launch.
После изменения launch-файла необходимо перезагрузить сервис clover:
sudo systemctl restart clover
UDP-бридж с автоматическим подключением
- Измените параметр
gcs_bridgeнаudp-b. - При открытии программы QGroundControl соединение должно установиться автоматически.
UDP-бридж без автоматического подключения
Измените параметр
gcs_bridgeнаudp.В QGroundControl создайте подключение со следующими настройками:
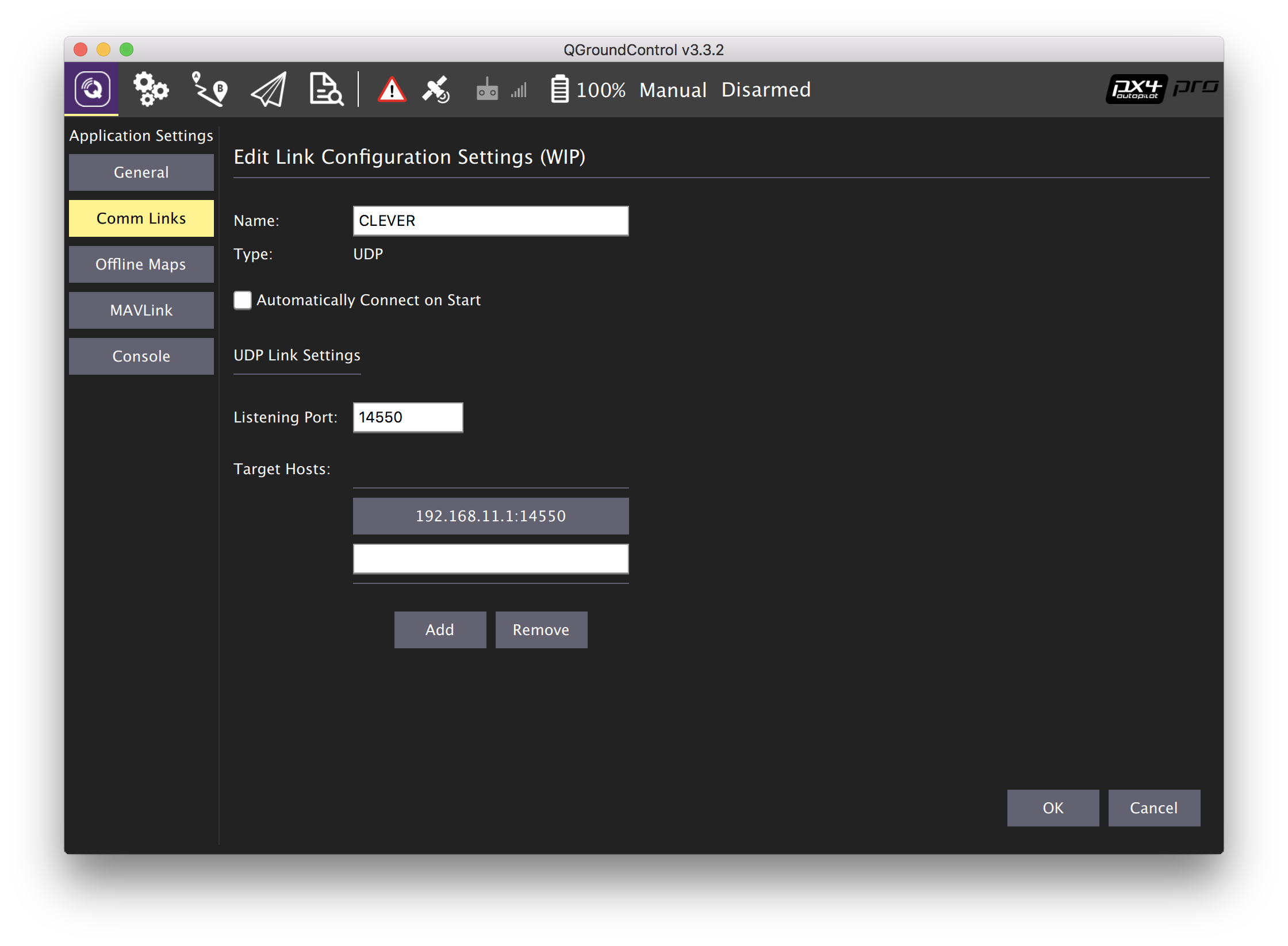
Выберите созданное подключение и нажмите Connect.
UDP broadcast-бридж
СОВЕТ
Особенностью UDP broadcast-бриджа является возможность просмотра телеметрии дрона одновременно с нескольких устройств (например с телефона и компьютера). Также он хорошо подходит для организации сети из устройств при помощи роутера.
- Измените параметр
gcs_bridgeнаudp-pb. - При открытии программы QGroundControl соединение должно установиться автоматически.
Далее: Доступ по SSH.