Полетные режимы
Режим полетного контроллера PX4 определяет, как именно квадрокоптер (или другой аппарат) должен себя вести: каким образом интерпретировать входящие команды и сигналы с пульта. Режим переключается одним из переключателей на пульте радиоуправления.
Чтобы настроить полетные режимы:
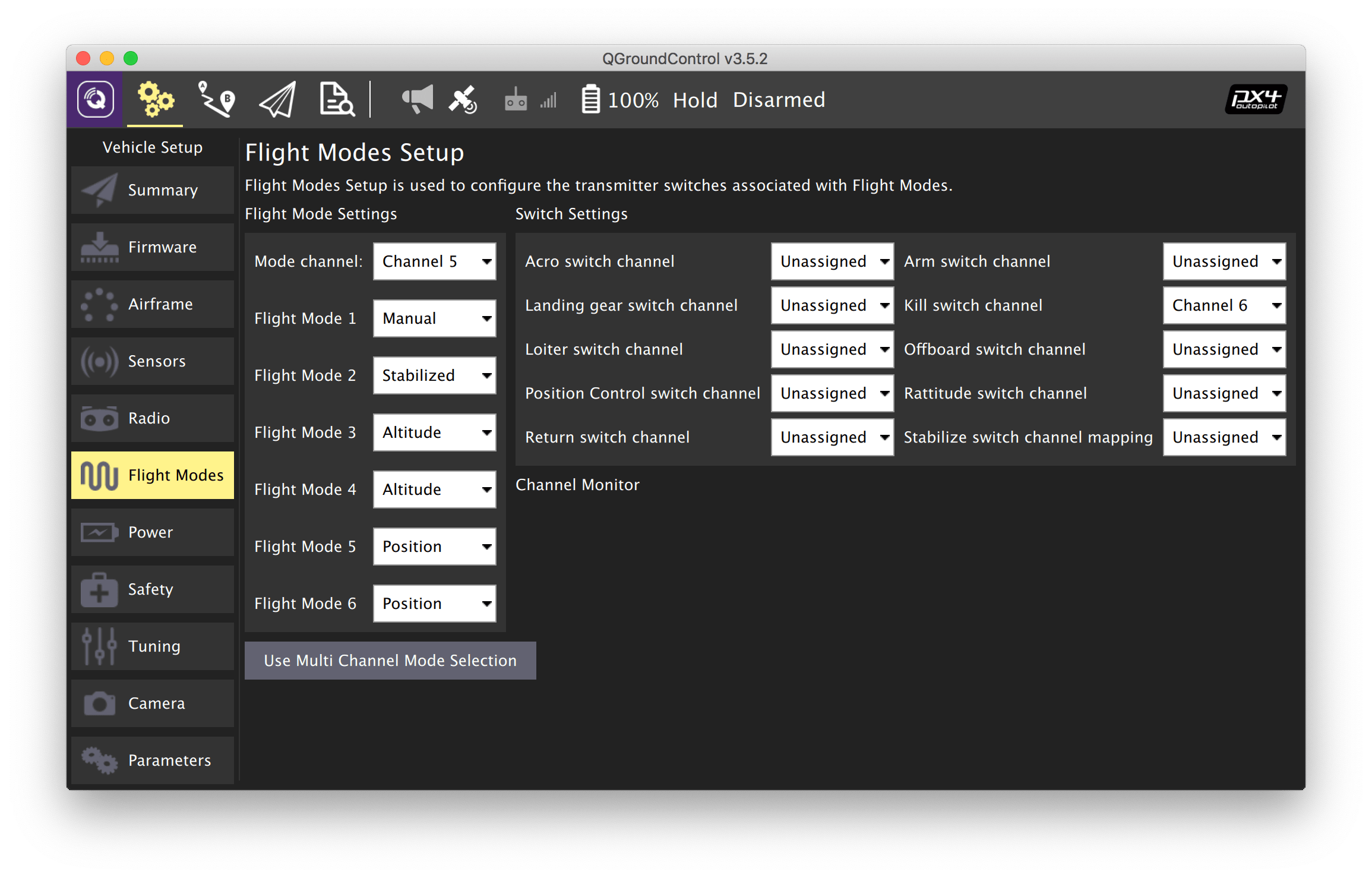
В программе QGroundControl перейдите в панель Vehicle Setup.
Выберите меню Flight Modes.
Установите переключатель режимов (Mode Channel) на переключатель SwC (Channel 6).
Опционально, установите экстренное отключение пропеллеров (Emergency Kill Switch Channel) на переключатель SwA (Channel 5).
Выберите необходимые полетные режимы.
Рекомендуемые полетные режимы:
- Flight Mode 1: Stabilized.
- Flight Mode 4: Altitude.
- Flight Mode 6: Position.
Проверьте корректность переключения режимов, переключая переключатель на пульте.
Назначьте аварийное отключение моторов (Kill switch) на переключатель SwA (Channel 5).
Подробное описание полетных режимов
Ручное управление
При ручном управлении пилот управляет квадрокоптером напрямую. GPS, данные с компьютерного зрения и барометр не используются. Для полетов в этих режимах необходимы хорошие навыки пилотирования мультикоптеров.
- STABILIZED/MANUAL — режим стабилизации горизонтального положения. Управление газом, углами наклона коптера по тангажу и крену, угловой скоростью по рысканью.
- ACRO — управление газом и угловой скоростью коптера по тангажу, крену и рысканью. Используется дрон-рейсерами и в шоу 3D-пилотирования для выполнения трюков.
- RATTITUDE — в центре правый стик аналогичен STABILIZED, по краям переходит в режим ACRO.
С использованием дополнительных датчиков
- ALTCTL (Altitude) — управление скоростью изменения высоты полета, углами по тангажу и крену и угловой скоростью по рысканью. Используется барометр (или иной датчик высоты).
- POSCTL (Position) — управление скоростями набора высоты, скоростью движения вперед/назад и вправо/влево, угловой скоростью по рысканью. Наиболее простой для полетов режим. Используется барометр, GPS, компьютерное зрение, другие датчики.
Автоматический полет
В этих режимах квадрокоптер игнорирует сигналы с пульта и летает по какой-либо автоматической программе.
- OFFBOARD — управление полетом с внешнего компьютера (например, Raspberry Pi). Этот режим используется в Клевере для программирования автономных полетов.
- AUTO.MISSION – квадрокоптер выполняет заранее загруженную в квадрокоптер миссию. Миссия загружается при помощи QGroundControl, или по MAVLink. Этот режим чаще всего применяется для автоматических полетов по точкам с использованием GPS, например, для фотограмметрии.
- AUTO.RTL – коптер автоматически возвращается в точку взлета.
- AUTO.LAND – коптер выполняет посадку.
Дополнительная информация: https://dev.px4.io/en/concept/flight_modes.html.
Далее: Настройка питания.