Сборка Клевера 4.2 WorldSkills
Габаритный чертеж – clover-4.2-ws.pdf.
Размер крепежа
СОВЕТ
Во время сборки используются винты и стойки различных размеров, использование крепежа не соответствующего размера может повредить коптер.
 | Винт M3x10 |  | Стойка алюминиевая 40 мм |
 | Винт M3x8 |  | Стойка алюминиевая 15 мм |
| Винт M3x5 |  | Стойка нейлоновая 40 мм | |
| Саморез M2x5 |  | Стойка нейлоновая 30 мм | |
| Гайка M3 (самоконтрящаяся) |  | Стойка нейлоновая 20 мм | |
| Гайка M3 (нейлоновая) |  | Стойка нейлоновая 15 мм | |
 | Стойка демпферная |  | Стойка нейлоновая 6 мм |
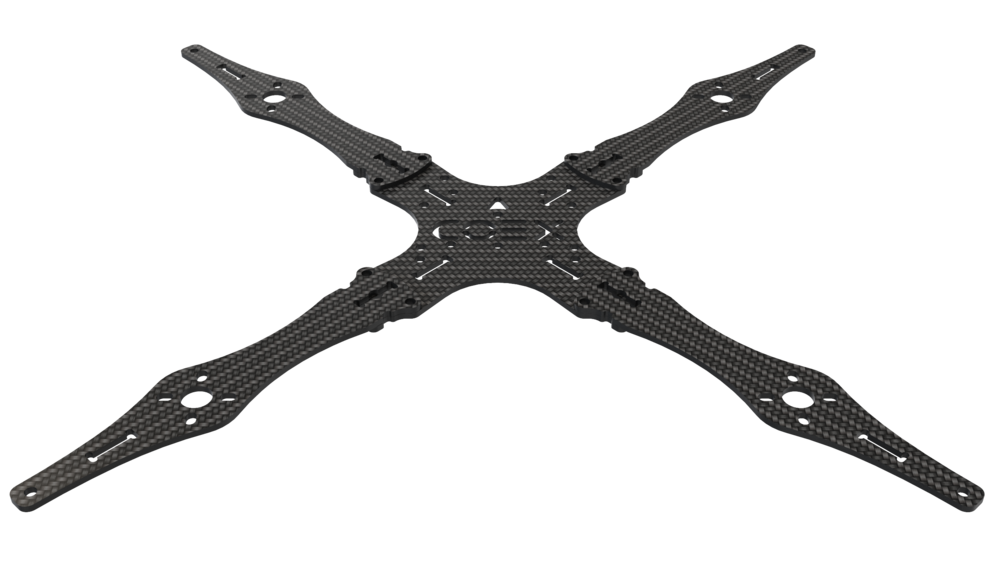
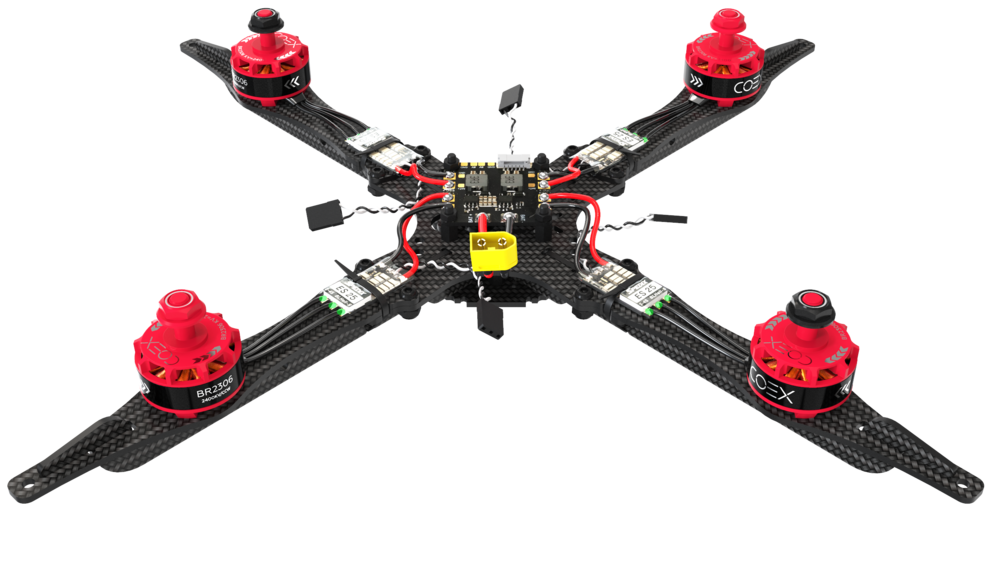
Сборка рамы
Совместите 4 луча с центральной декой, зафиксируйте их при помощи винтов М3х8 и самоконтрящихся гаек.
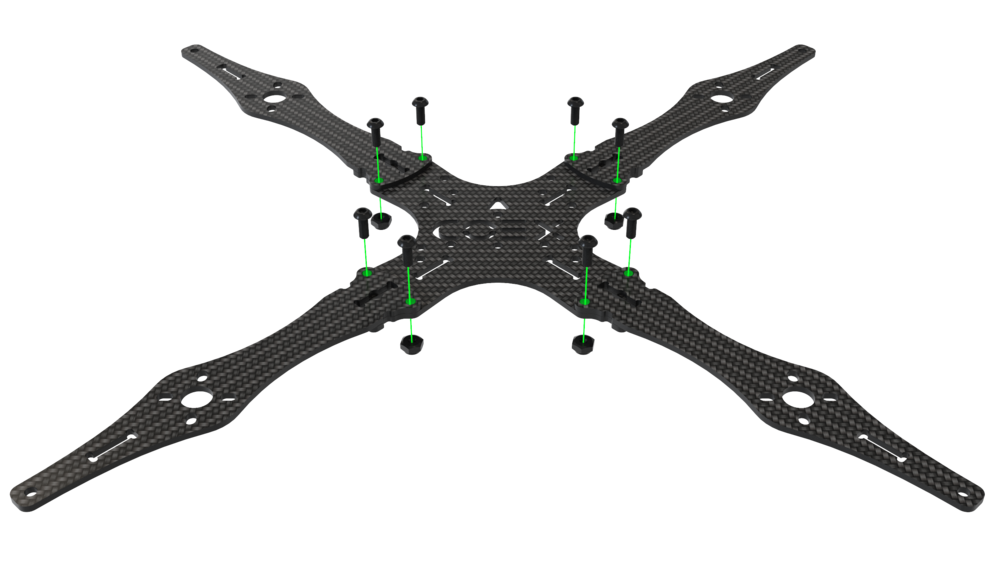
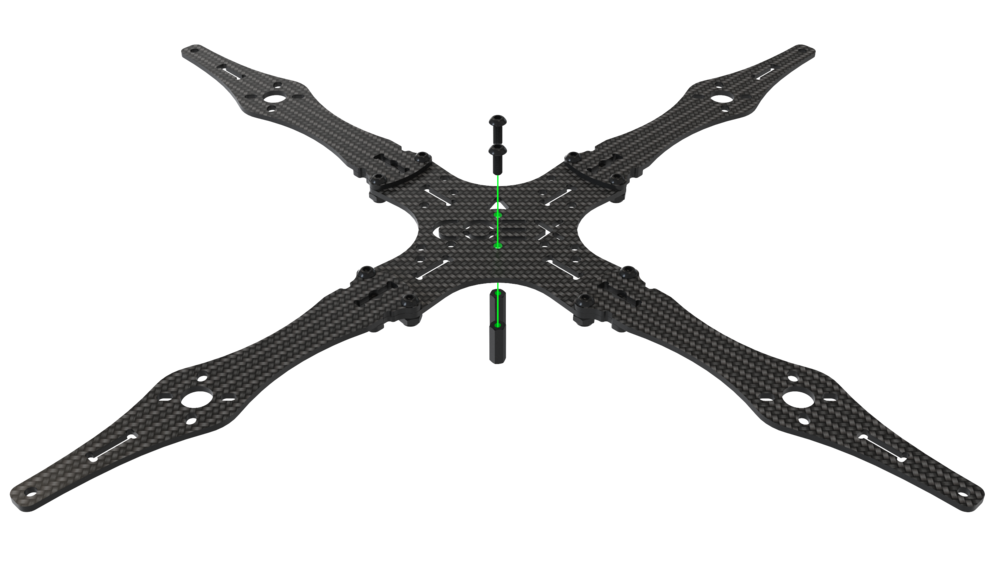
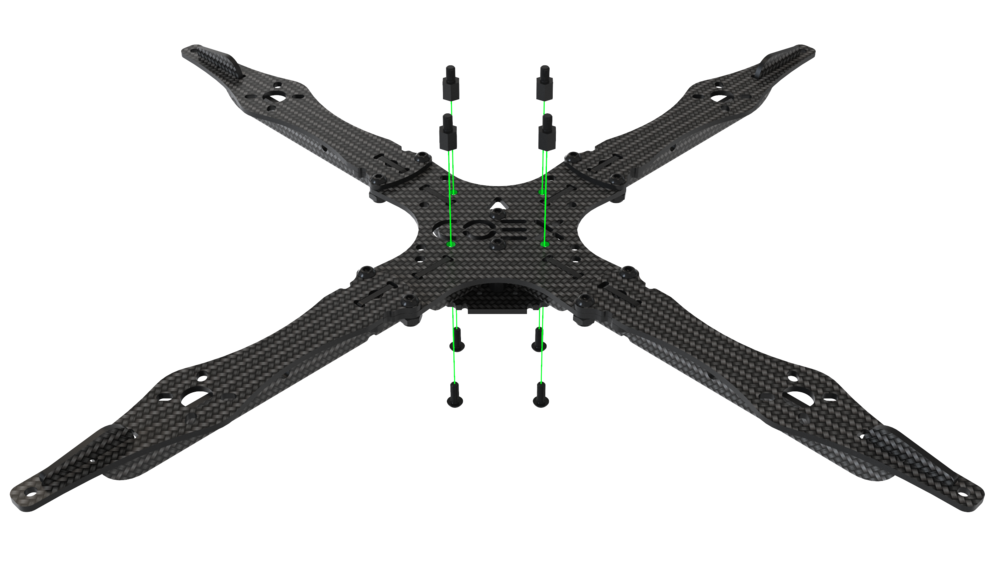
На центральные отверстия в главной деке установите 2 стойки 15 мм и закрепите их с помощью винтов М3х8.
Установите крючок пластины жесткости в паз на луче.
Прижмите пластины жесткости к главной деке.
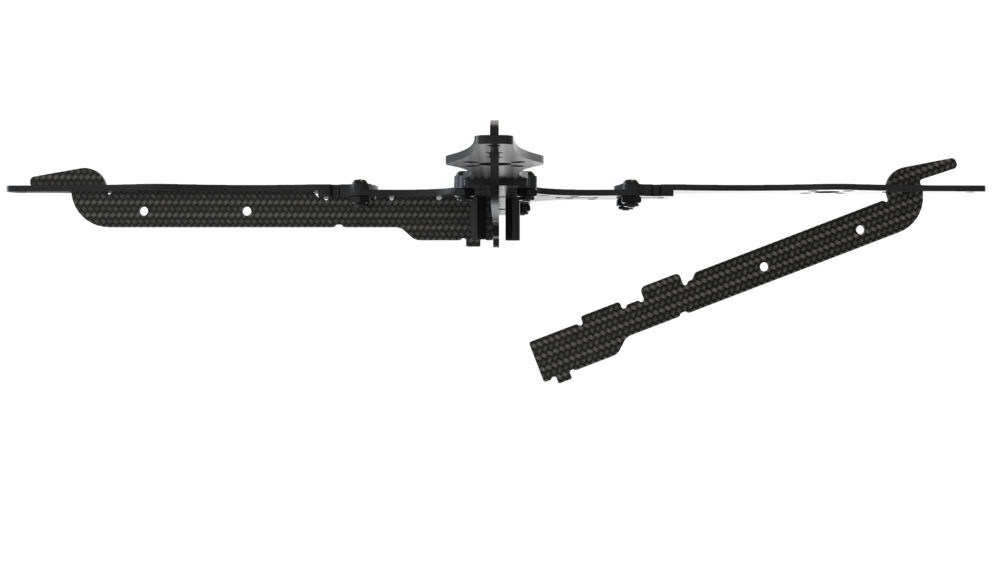
Стяните пластины жесткости с помощью малой карбоновой деки.
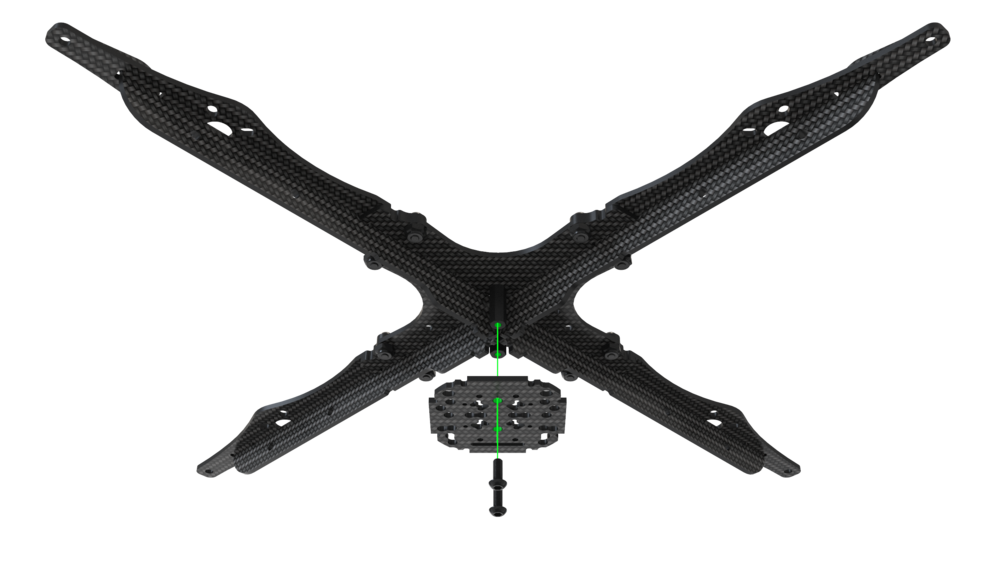
Установите 4 нейлоновые стойки 6мм и закрепите их с помощью винтов М3х5.
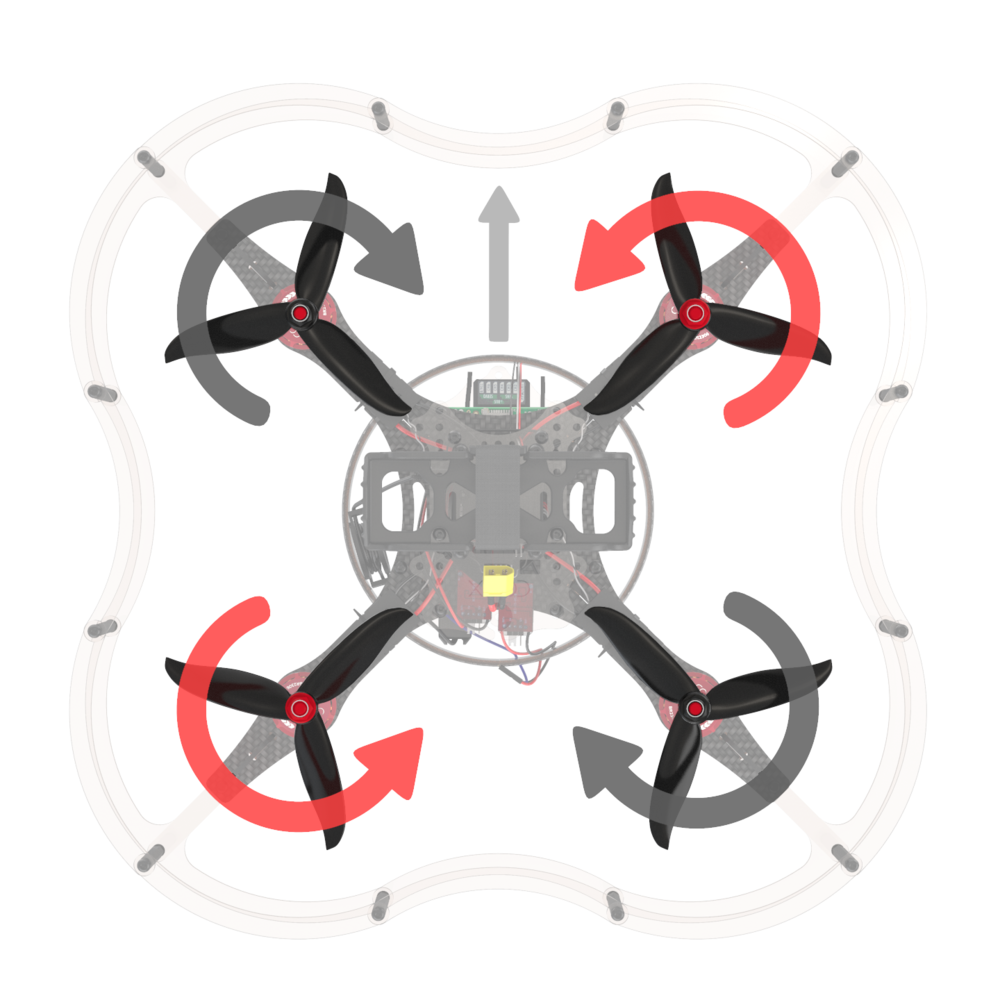
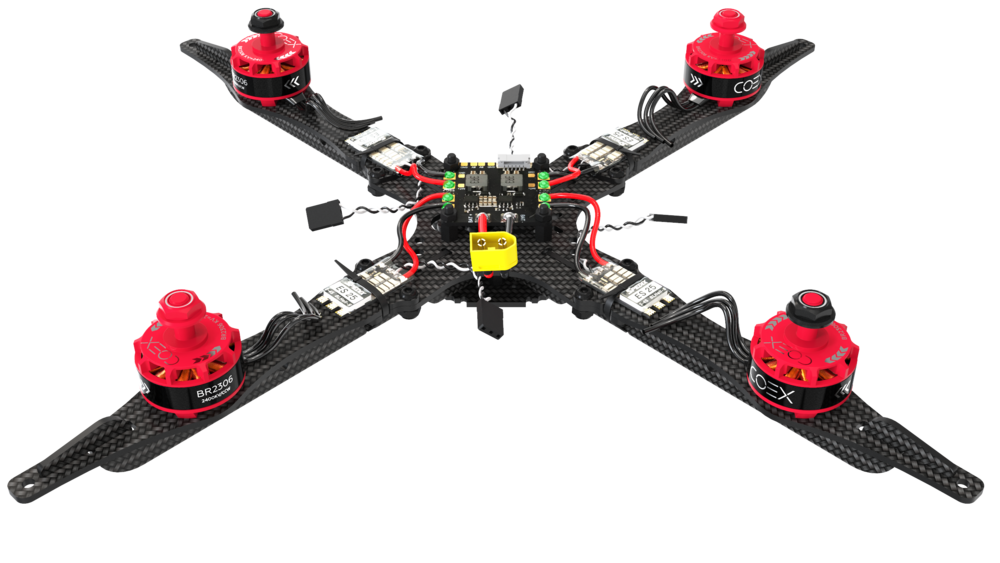
Установка моторов
При установке моторов обратите внимание на схему вращения моторов. Маркировка вращения на моторах должна совпадать со схемой вращения.
Установите мотор на соответствующие отверстия в луче с помощью винтов М3х5.


ВНИМАНИЕ
Убедитесь, что моторы закреплены с помощью винтов М3х5, в противном случае может возникнуть короткое замыкание между обмотками.
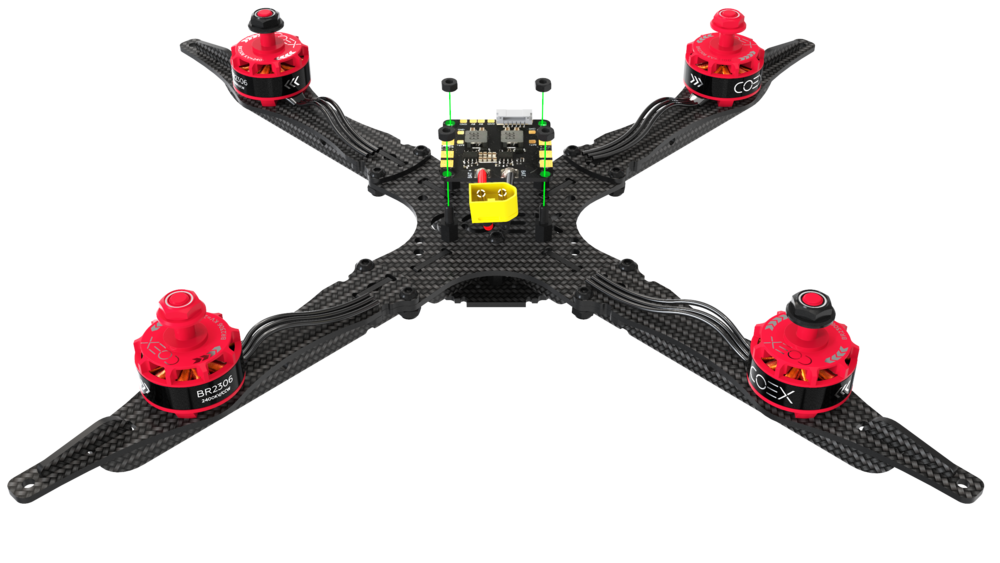
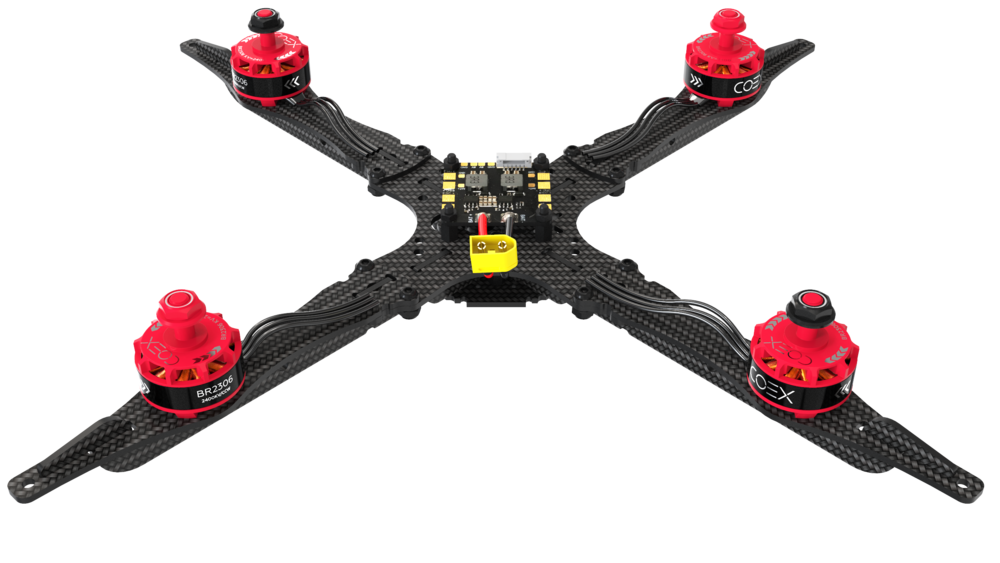
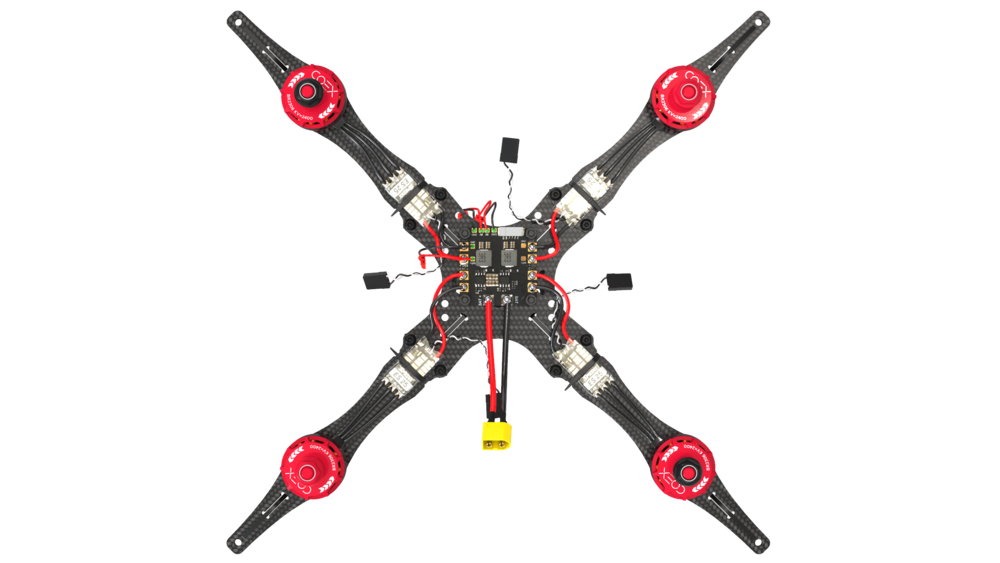
Установка ESC и PDB
На заранее закрепленные стойки установите плату распределения питания (PDB), она должна быть установлена таким образом, чтобы силовой кабель питания был направлен в сторону хвоста коптера.
Установите регуляторы оборотов (ESC) в соответствующие места на луче.
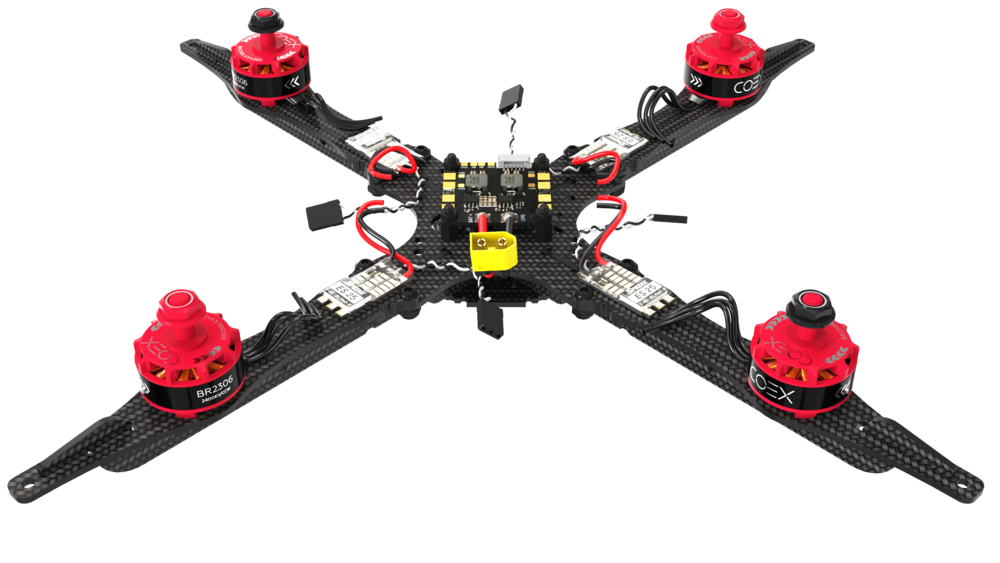
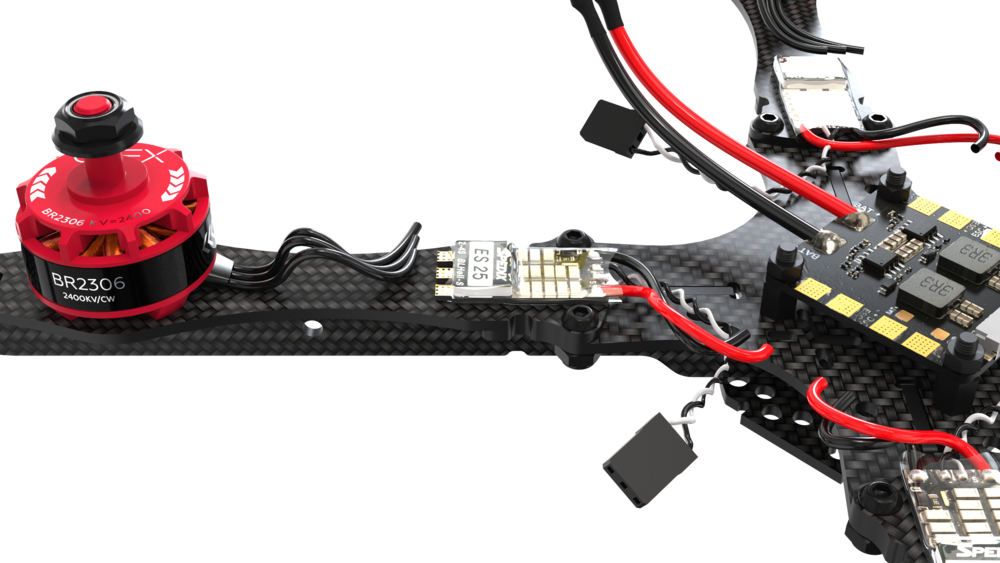
Притяните регуляторы оборотов (ESC) хомутами.
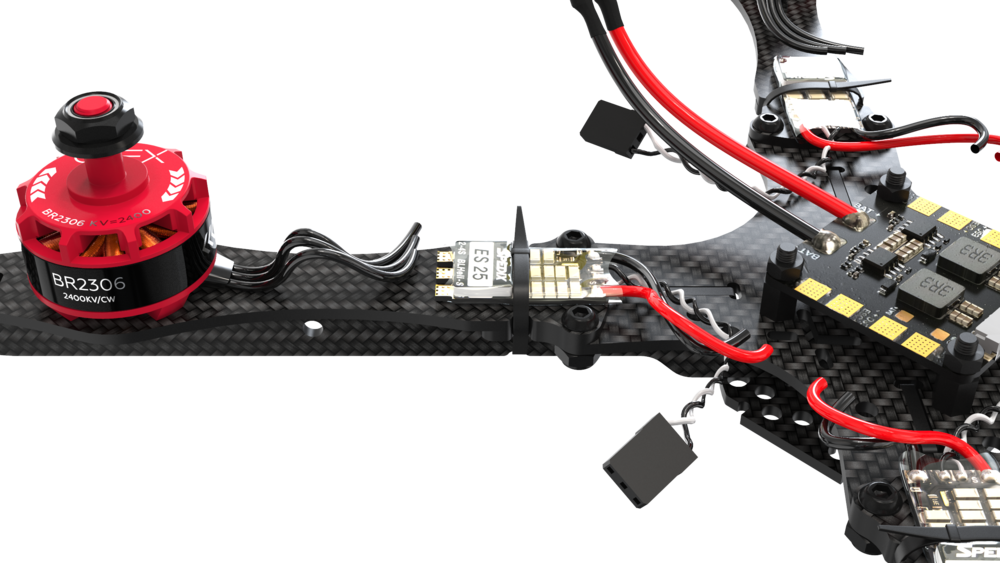
Отмерьте необходимое количество силового провода регуляторов оборотов(ESC), и обрежьте лишнее.
Зачистите и залудите обрезанные провода.
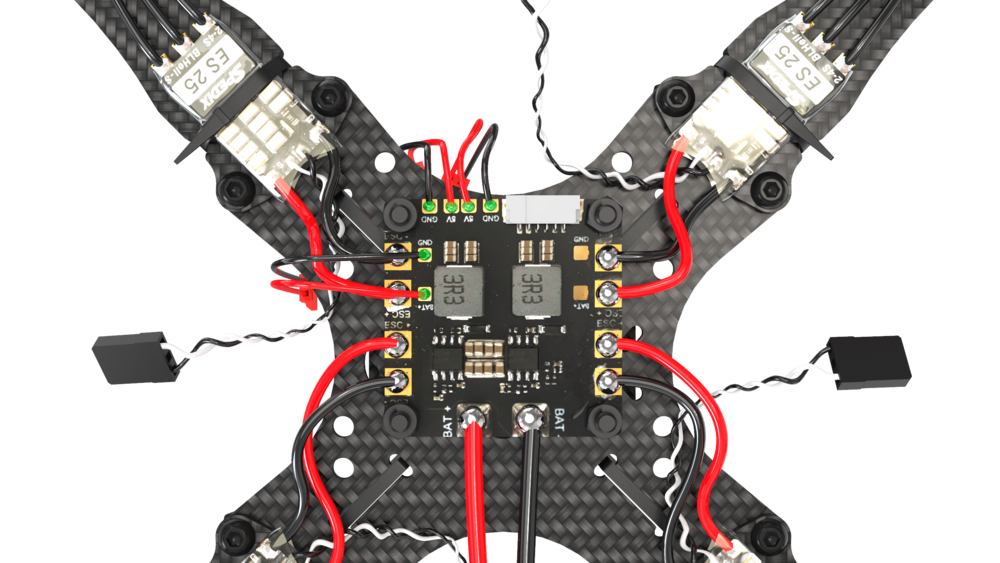
Залудите контактные площадки на плате распределения питания.
Припаяйте силовые провода регуляторов оборотов к плате распределения питания.
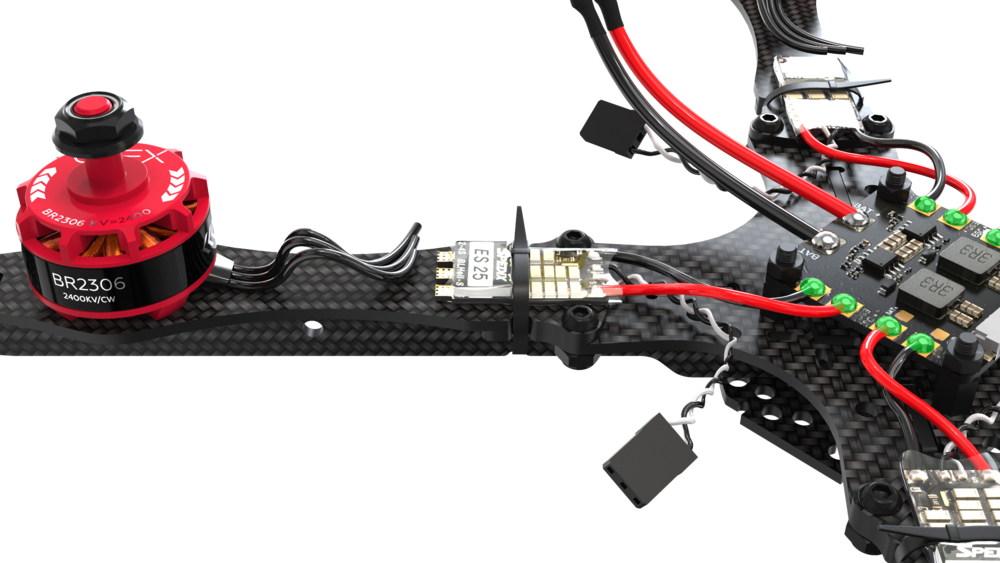
Caution Будьте внимательны к подписям контактов на плате. Красный провод должен идти к площадке с подписью +, а черный к подписи -.
Обрежьте лишний фазный кабель идущий от моторов.
Зачистите и залудите фазные кабели.
Залудите контактные площадки регуляторов оборотов.
Припаяйте фазные кабели к контактным площадкам регуляторов в любом порядке.

Припаяйте 3 разъема JST мама к 2ум площадкам 5V и площадке bat+.
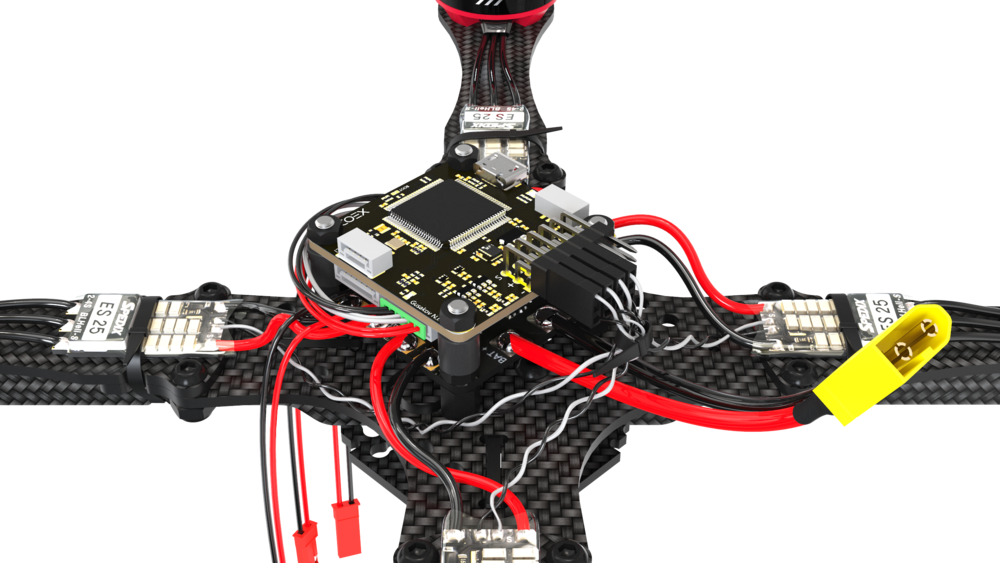
Установка полетного контроллера
Набор "Клевер 4" позволяет установить различные полетные контроллеры, к примеру, COEX Pix и Pixracer.
ВНИМАНИЕ
При установке полетного контроллера обратите внимание на ориентацию платы. Если Вы установите COEX Pix серворазъемами назад (как на изображениях в инструкции) то впоследствии при настройке полетного контроллера в Autopilot Orientation необходимо будет указать значение ROTATION_ROLL_180_YAW_90, иначе полетный контроллер будет некорректно воспринимать наклоны и повороты коптера. Для полетного контроллера Pixracer это не требуется.
COEX Pix
СОВЕТ
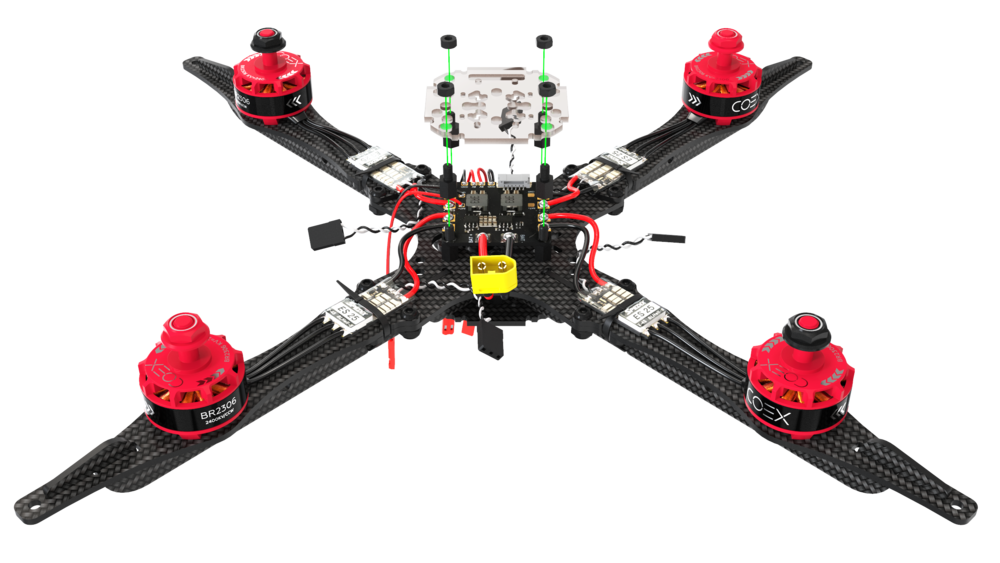
Перед установкой демпферных стоек, накрутите 2 слоя нейлоновых гаек, для более прочного крепления или откусите лишнюю резьбу с помощью бокорезов.
Закрепите плату распределения питания с помощью нейлоновых гаек, сверху установите демпферные стойки.
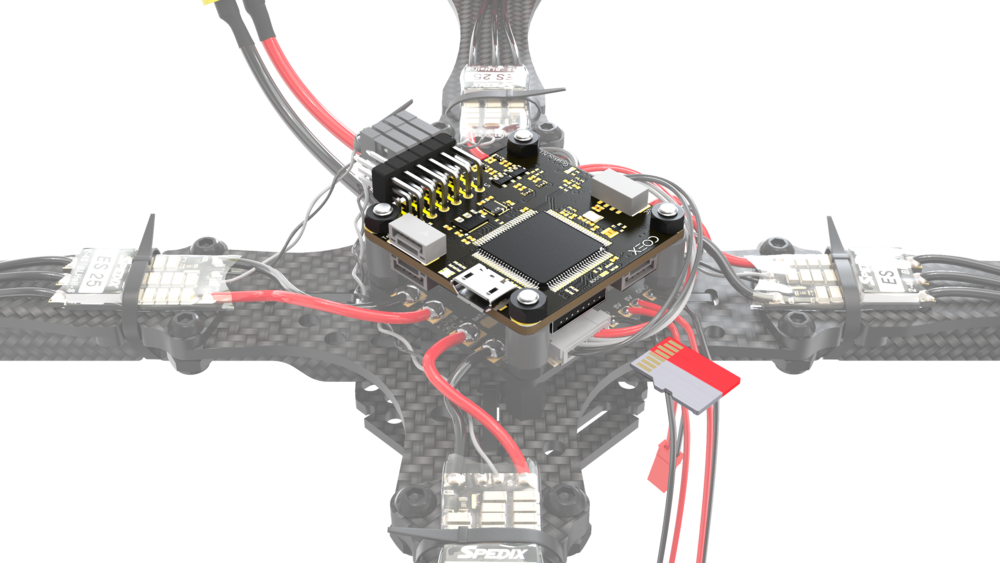
Установите полетный контроллер и закрепите нейлоновыми гайками.
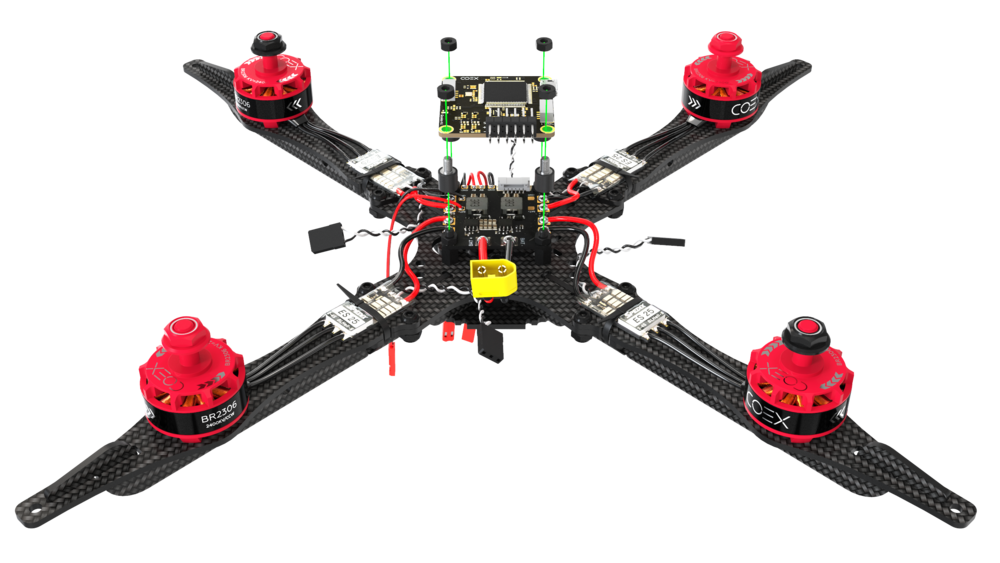
Вставьте флеш-карту для записи логов в полетный контроллер.
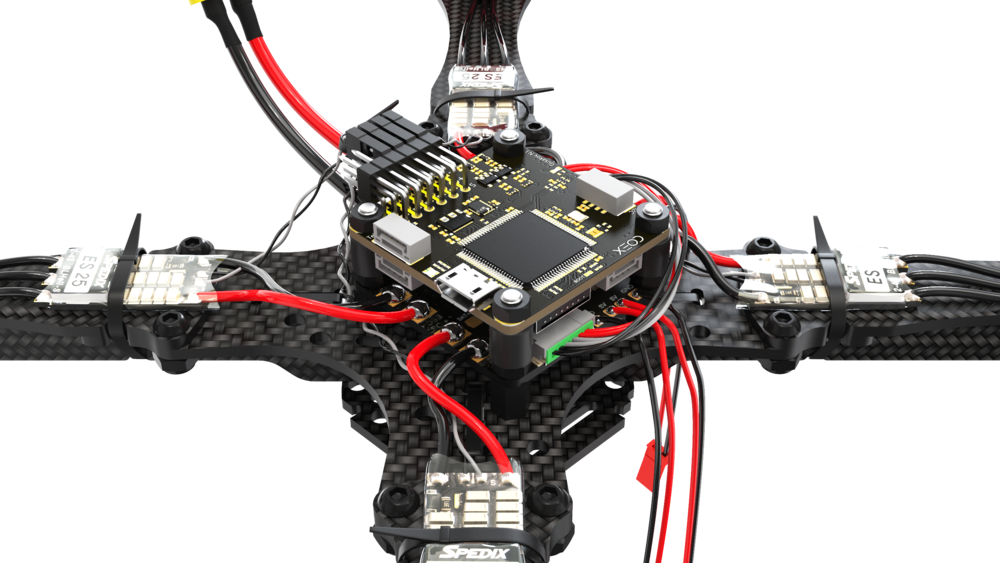
Pixracer
Закрепите плату распределения питания с помощью нейлоновых стоек 6мм.
Установите малую крепежную деку и закрепите ее с помощью нейлоновых гаек.
Склейте 3–4 слоя двустороннего скотча, приклейте его в центр малой деки и установите сверху Pixracer.
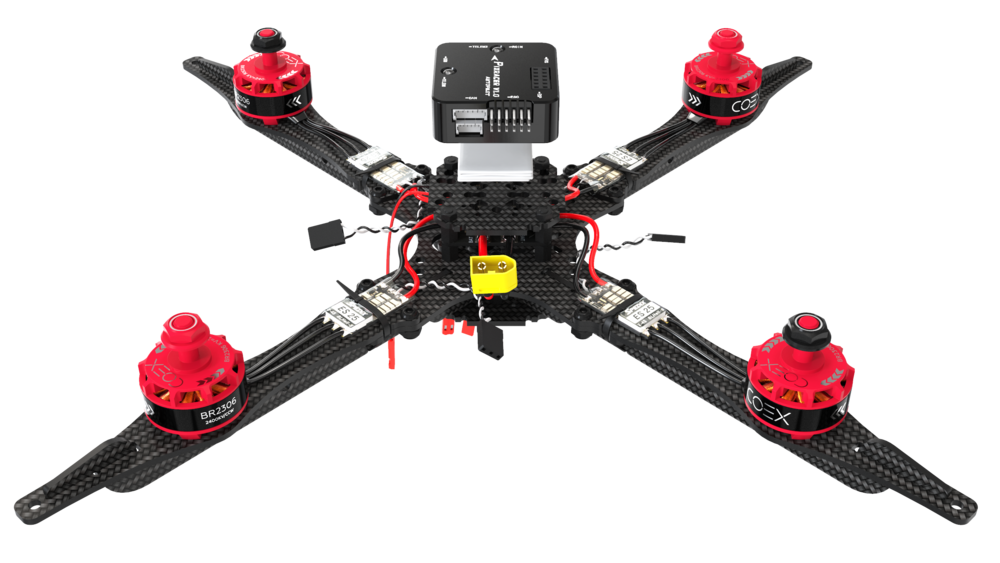
Вставьте флеш-карту для записи логов в полетный контроллер.

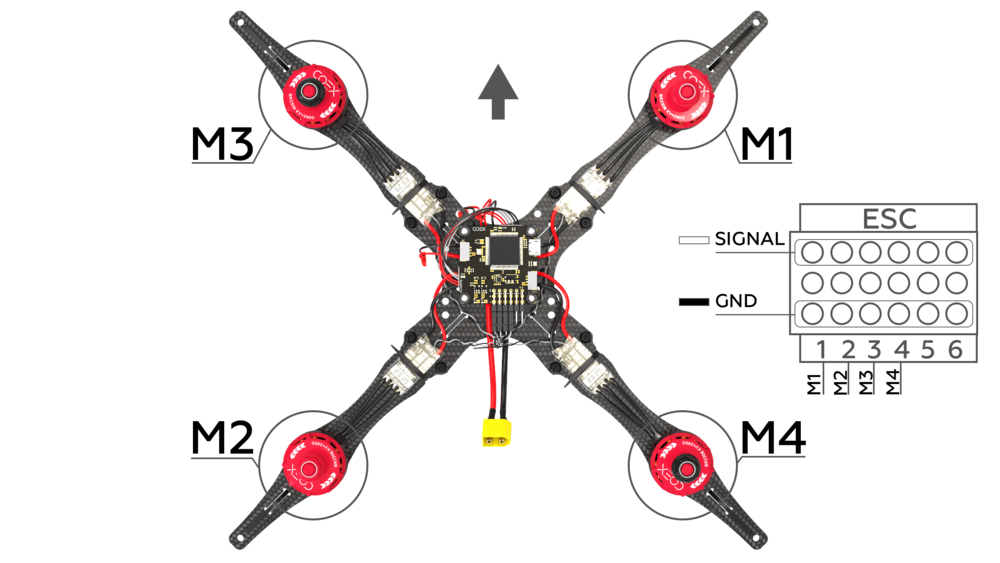
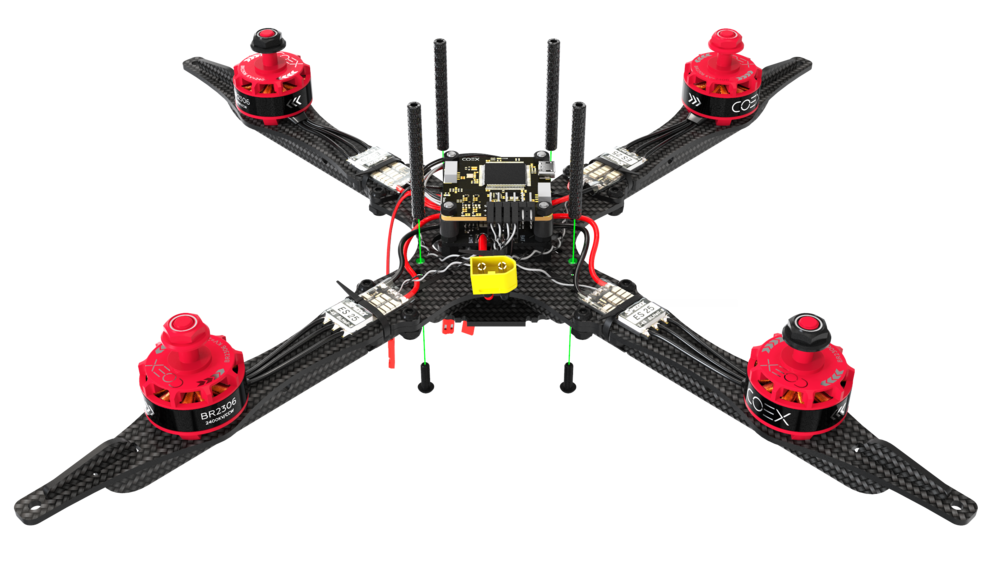
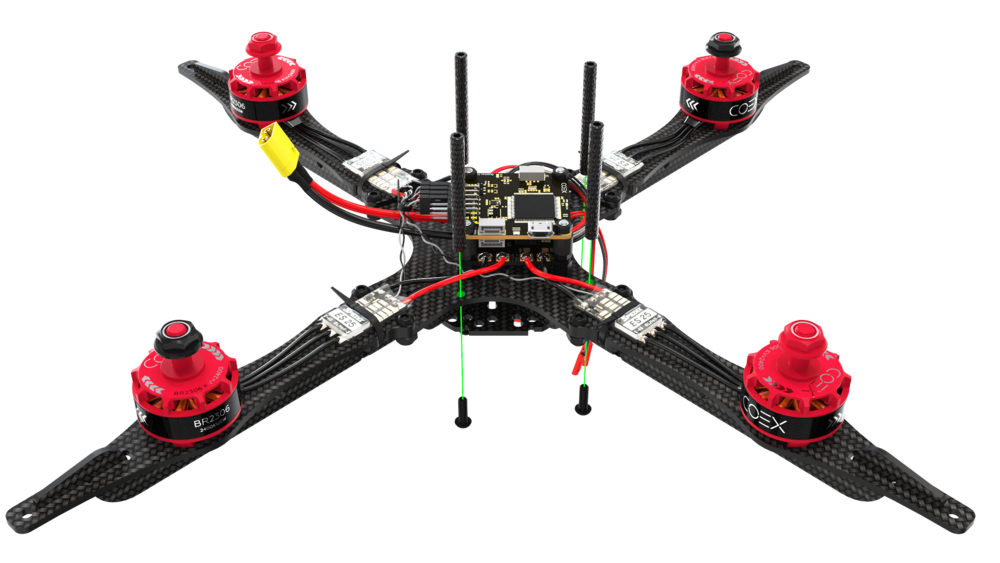
Подключение полетного контроллера
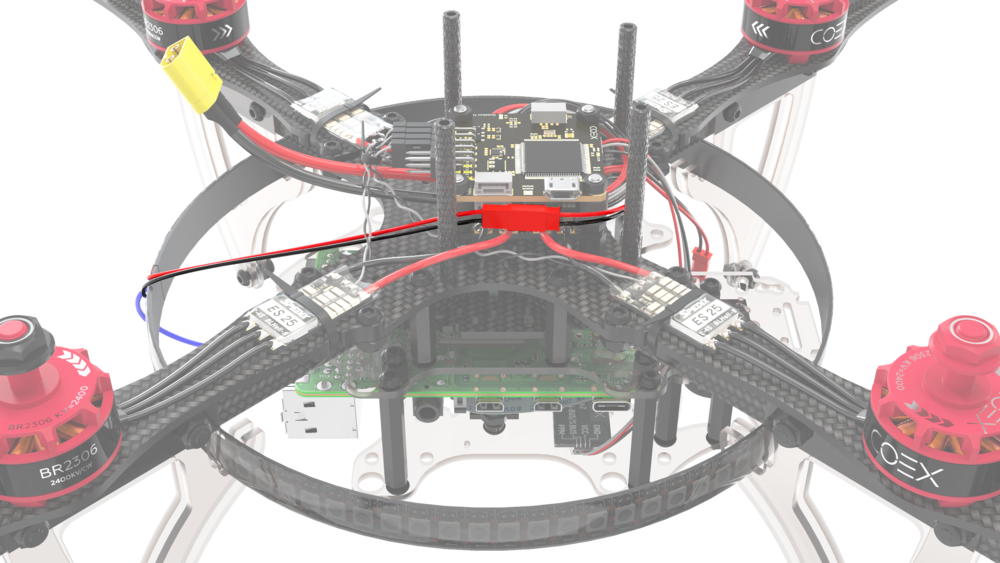
Подключите регуляторы оборотов к полетному контроллеру в соответствии со схемой.
Подключите кабель питания к плате распределения питания (PDB) и соответствующему разъему на полетном контроллере.
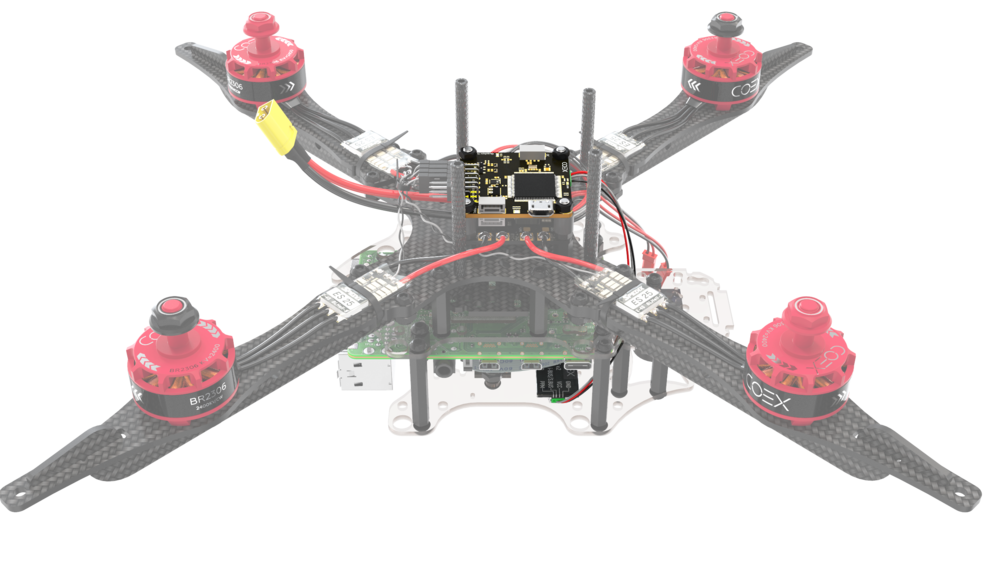
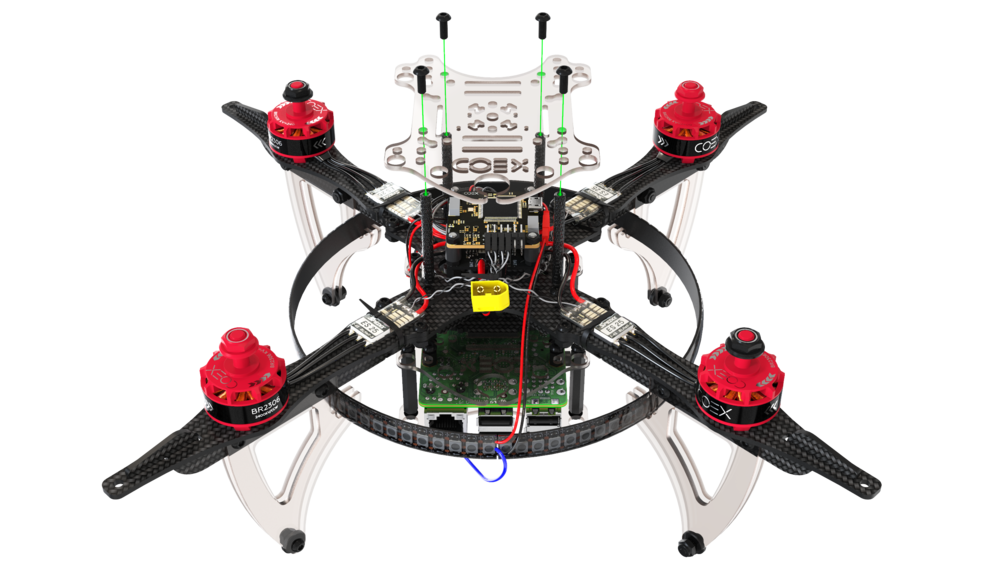
Установите алюминиевые стойки 40 мм на винты М3х10.
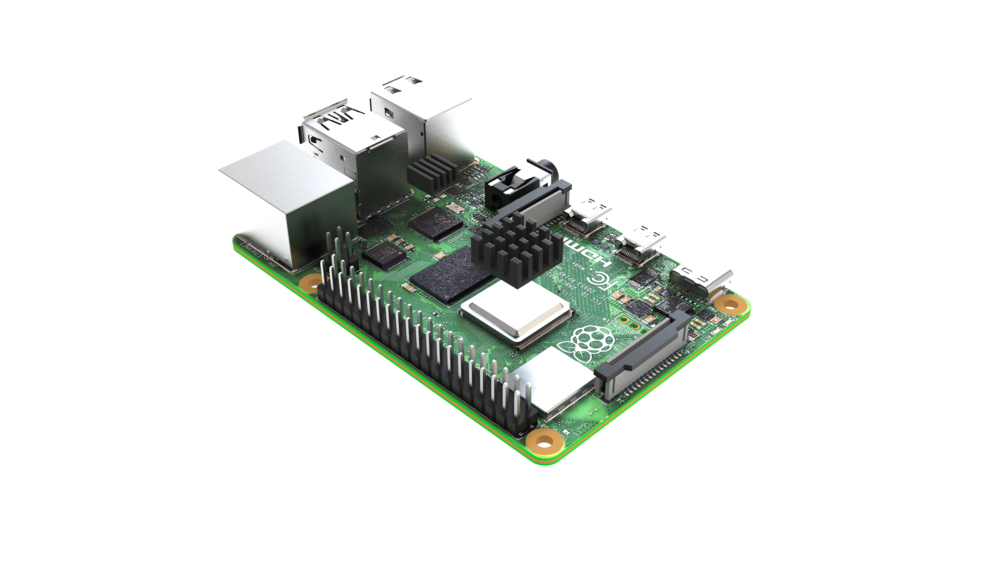
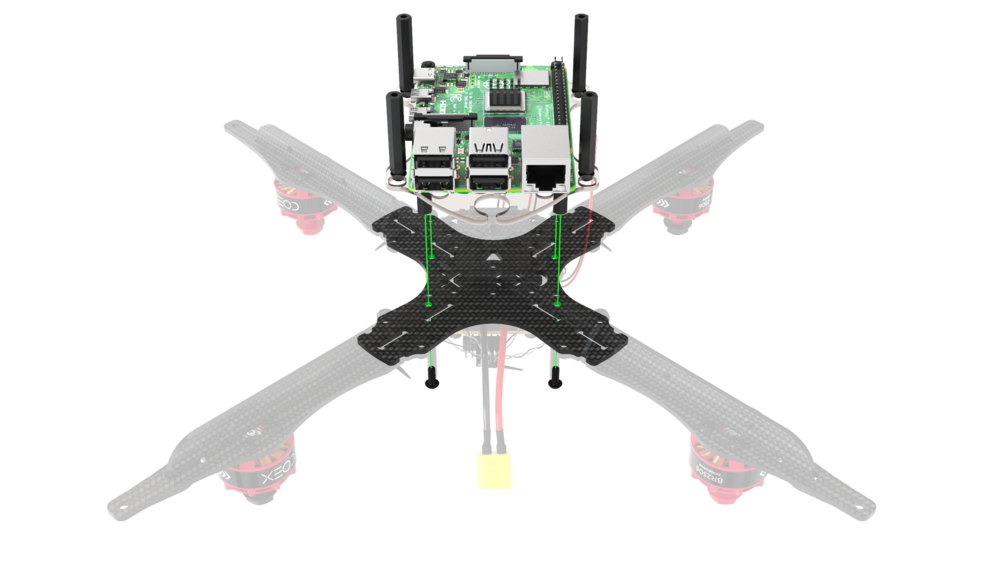
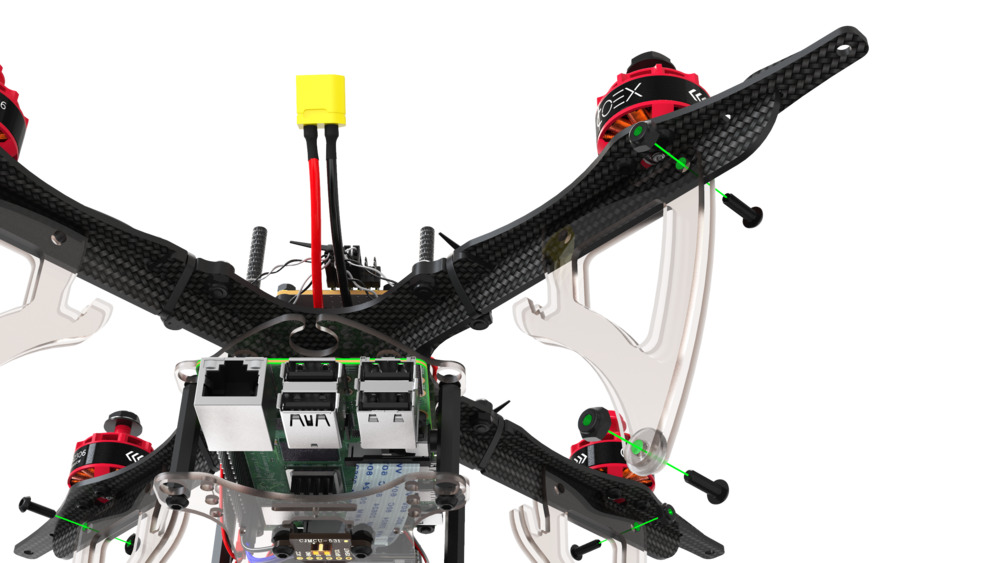
Установка Raspberry Pi
На монтажную деку установите стойки 20 мм и 40 мм, закрепите их с помощью винтов М3х8.
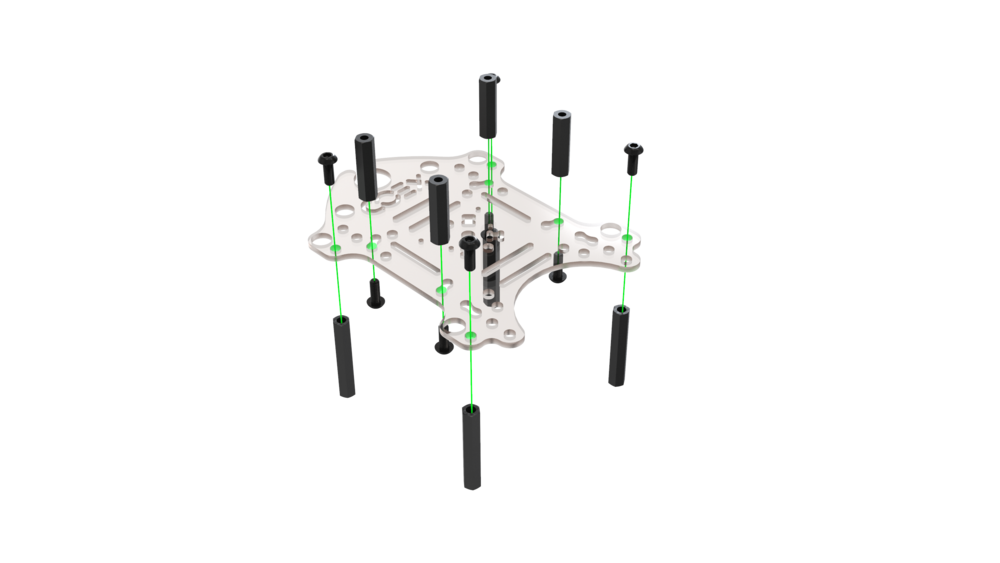
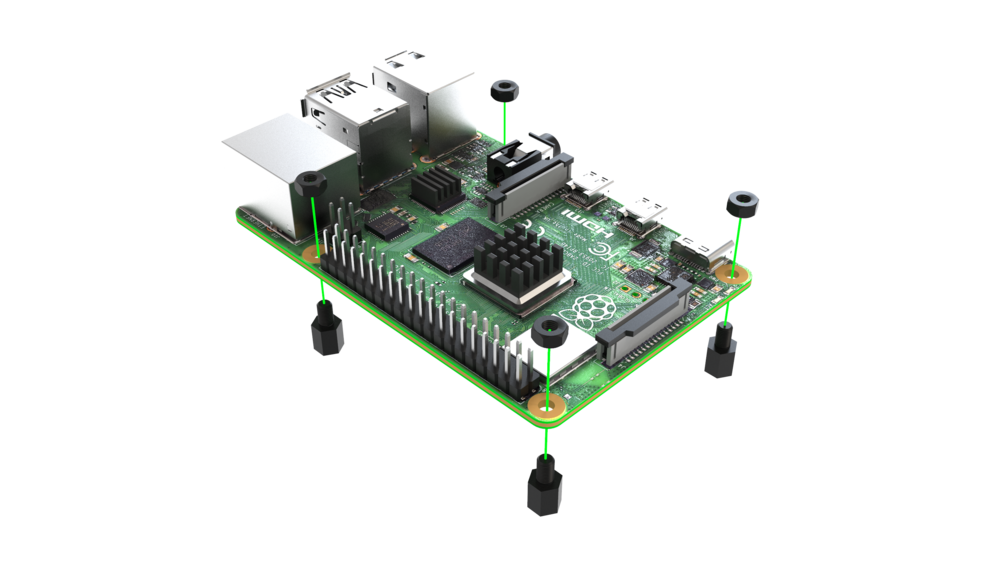
Нарежьте резьбу М3 в крепежных отверстиях Raspberry Pi с помощью болта М3х10.
Вкрутите в плату Raspberry Pi стойки 6мм, при необходимости закрепите их нейлоновыми гайками.
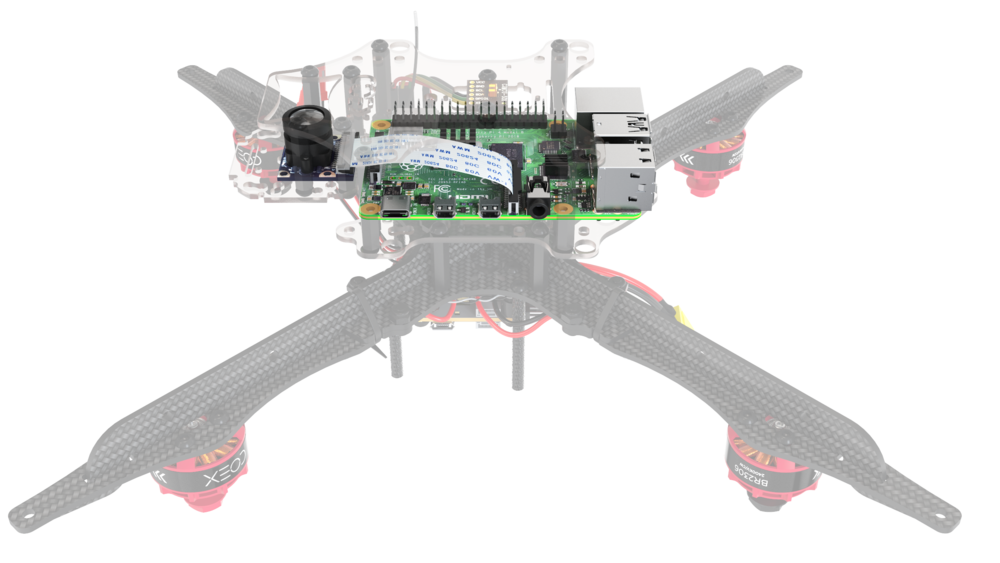
Установите Raspberry Pi на монтажную деку, закрепив ее болтами М3х6.
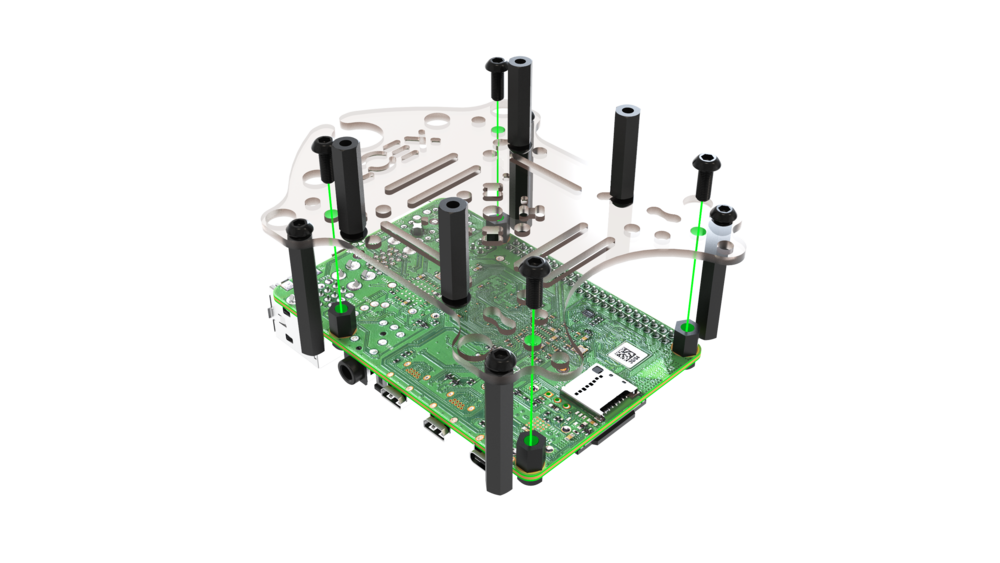
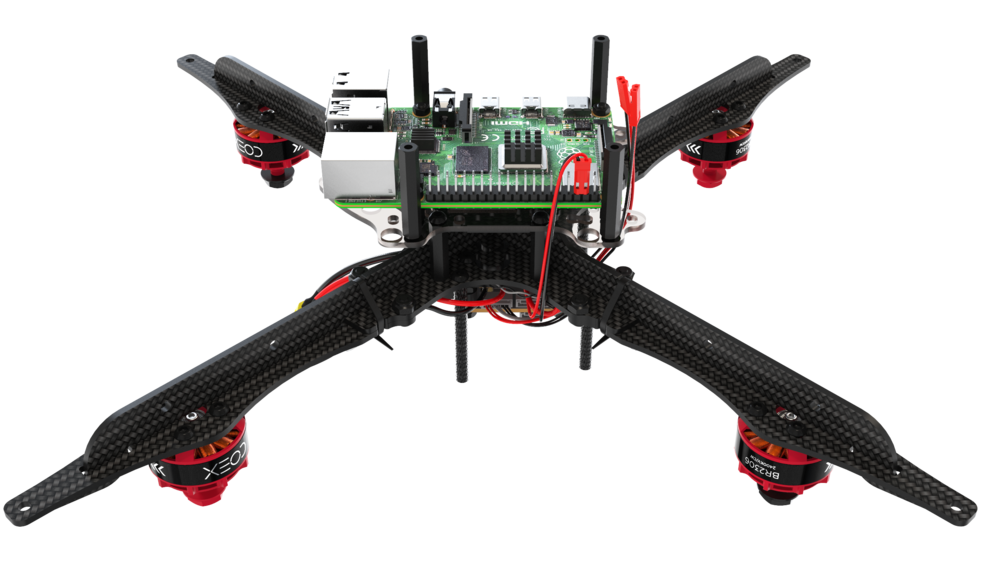
Установите собранный модуль в соответствующие пазы основной деке дрона.
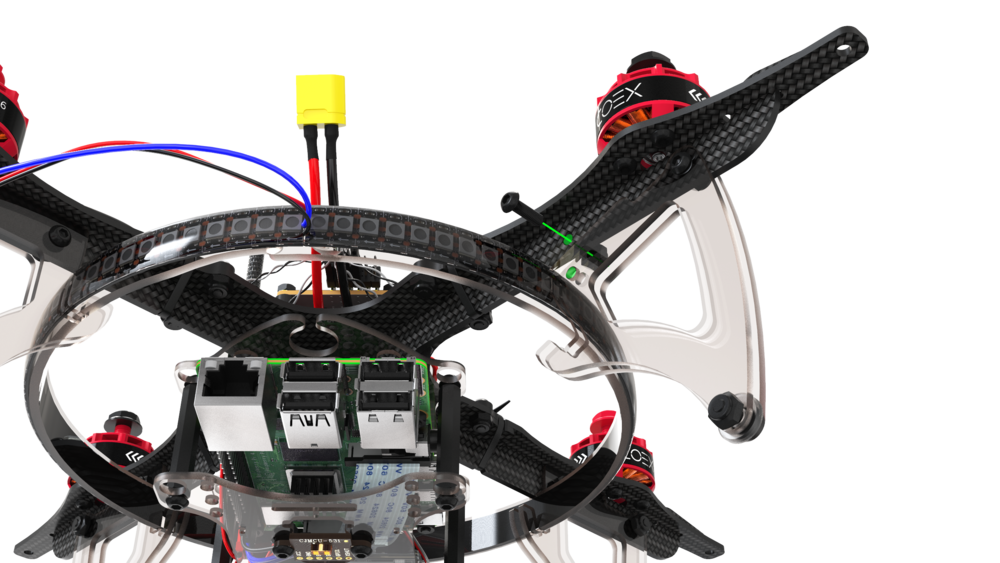
Подключите разъем 5V JST в соответствующие пины питания Raspberry Pi.
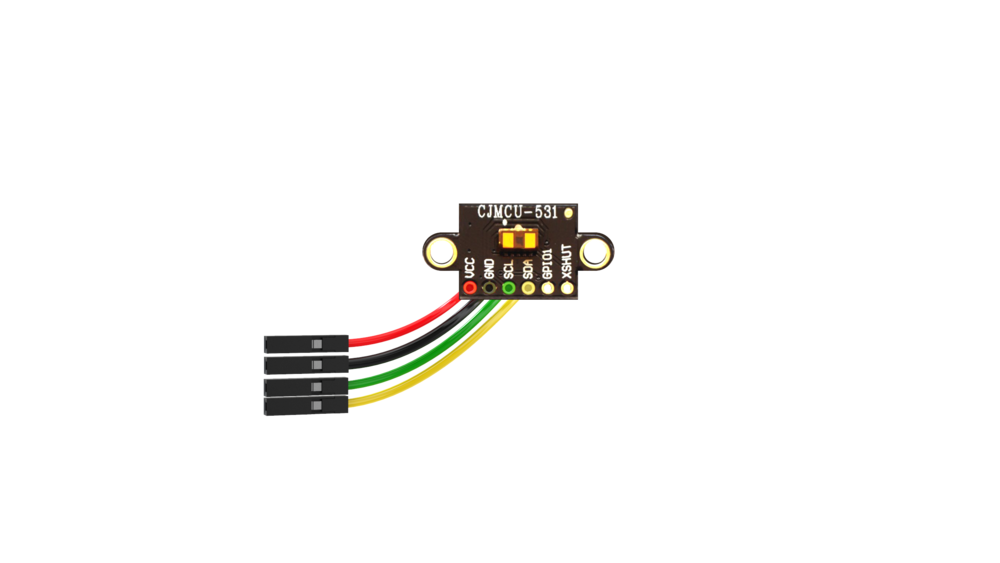
Возьмите 4 провода Dupont, обрежьте 5–7 см кабеля и припаяйте к соответствующим пинам дальномера.
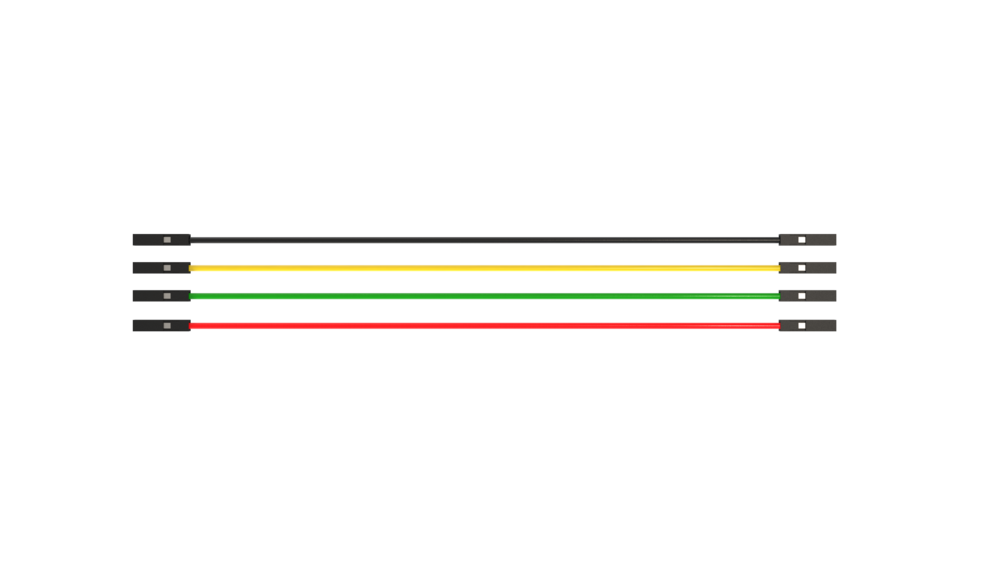
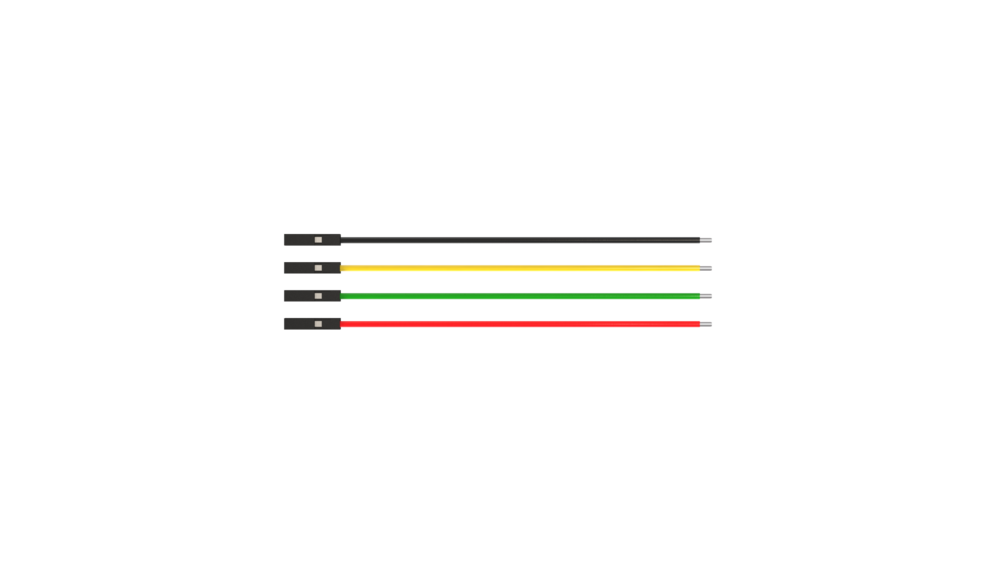
Провод Пин дальномера Красный 5v Черный GND Желтый SDA Зеленый SCL 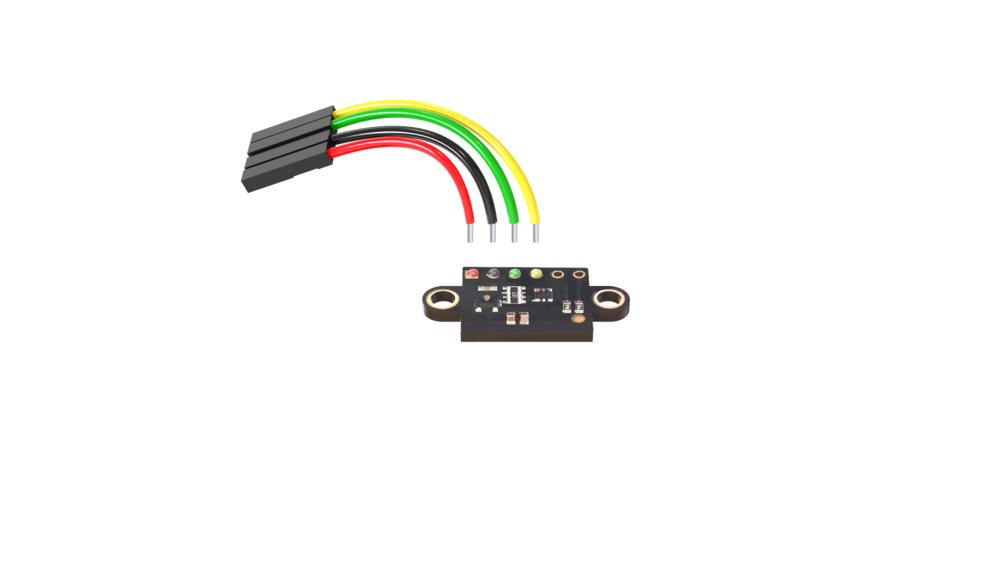
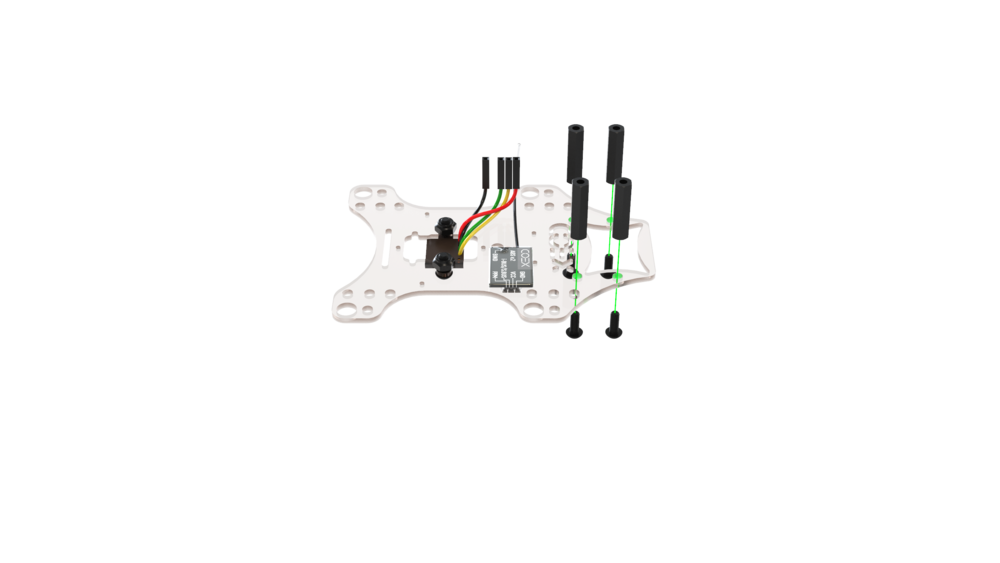
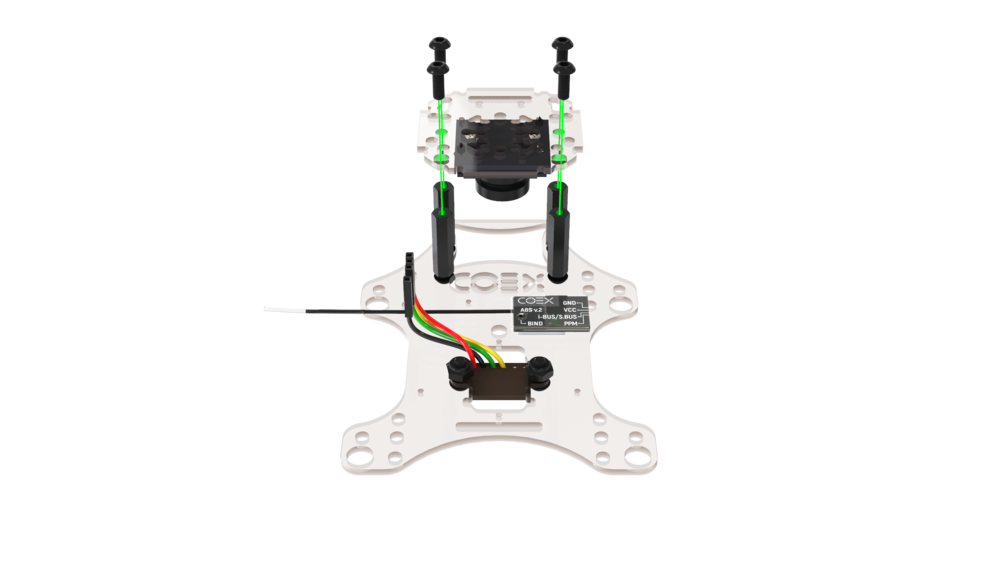
Установите дальномер на деку захвата и Приклейте радиоприемник на 3М скотч.
Caution Устанавливайте дальномер таки образом, чтобы гайки не прислонялись к плате напрямую. При такой установке если большая вероятность повредить элементы платы.
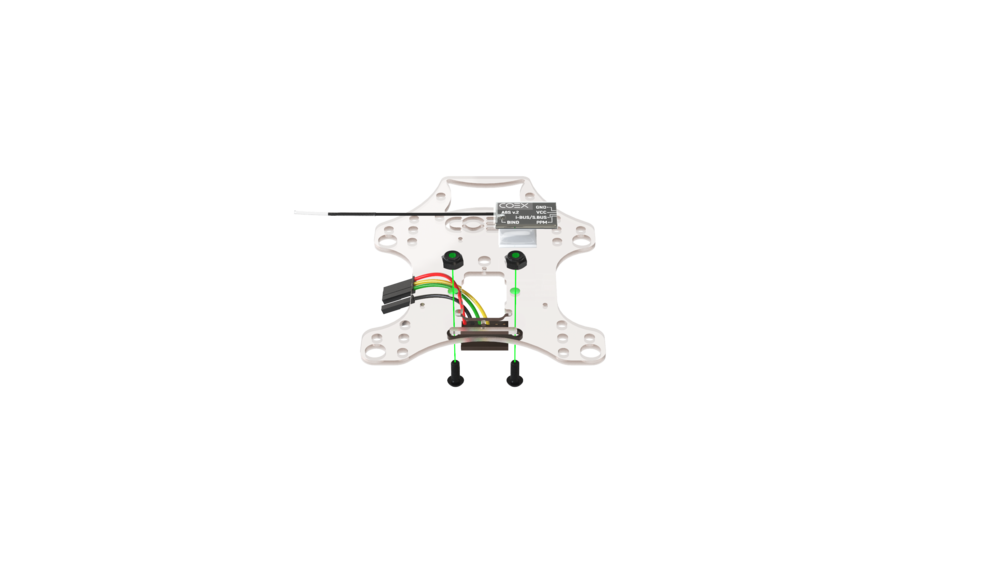
Установите 4 нейлоновые стойки 20мм и зафиксируйте их болтами М3х8.
На малую монтажную деку установите камеру и зафиксируйте ее двумя короткими саморезами.
Caution Если закрепить камеру в верхнем правом углу и шляпка самореза будет касаться элемента на камере, камера не будет работать.
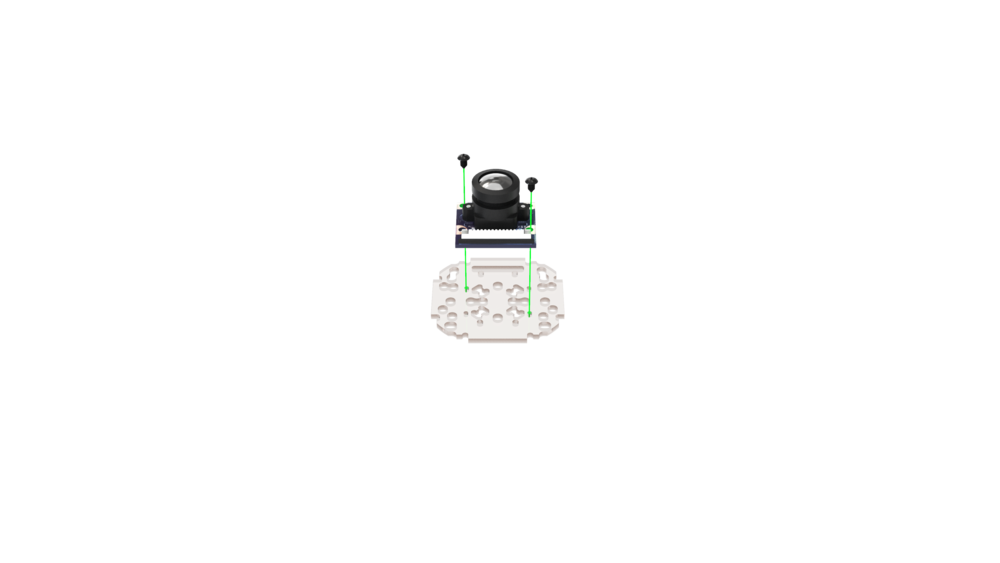
Установите малую монтажную деку с камерой на стойки и зафиксируйте с помощью болтов М3х8.
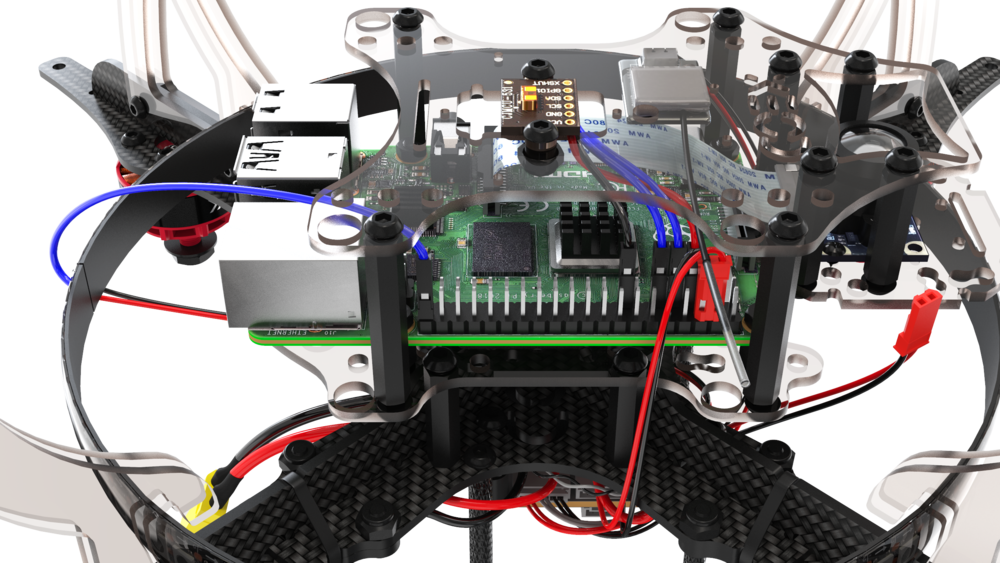
Собранный модуль установите над модулем Raspberry Pi и зафиксируйте болтами М3х8.

Соедините камеру и Raspberry Pi с помощью шлейфа.
Подсоедините дальномер к Raspberry Pi в соответствующие пины.

Соедините радиоприемник и полетный контроллер с помощью 4-х пинового кабеля.
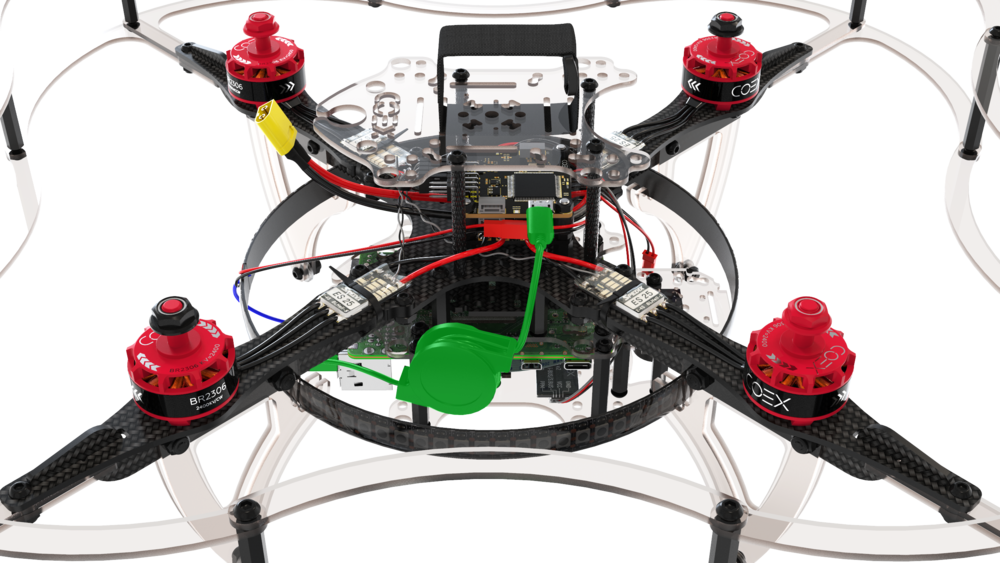
Установка LED ленты и ножек
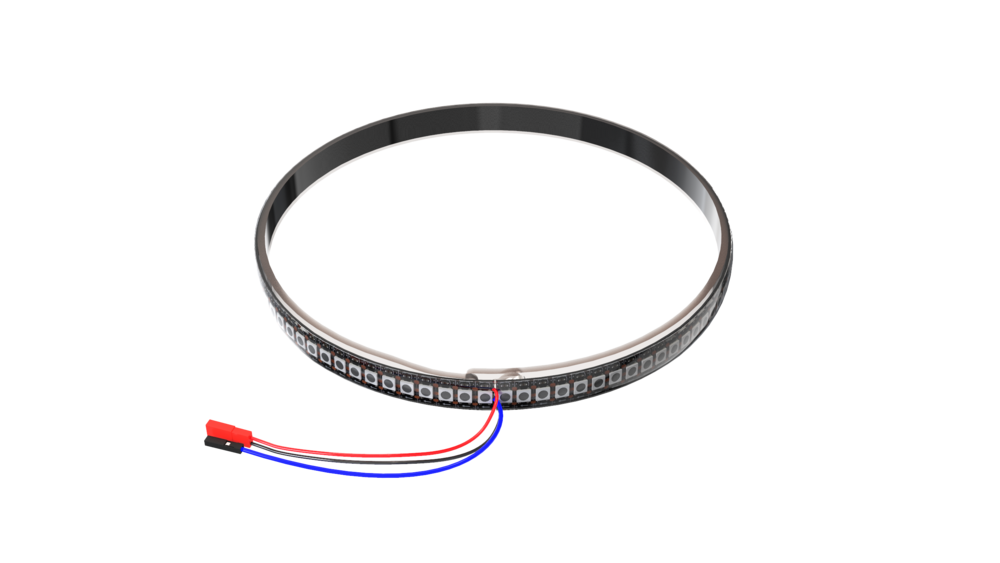
Соберите обруч для светодиодной ленты, объединив замок на концах.

Припаяйте JST-папа к площадке питания и Dupont-мама к сигнальной площадке.
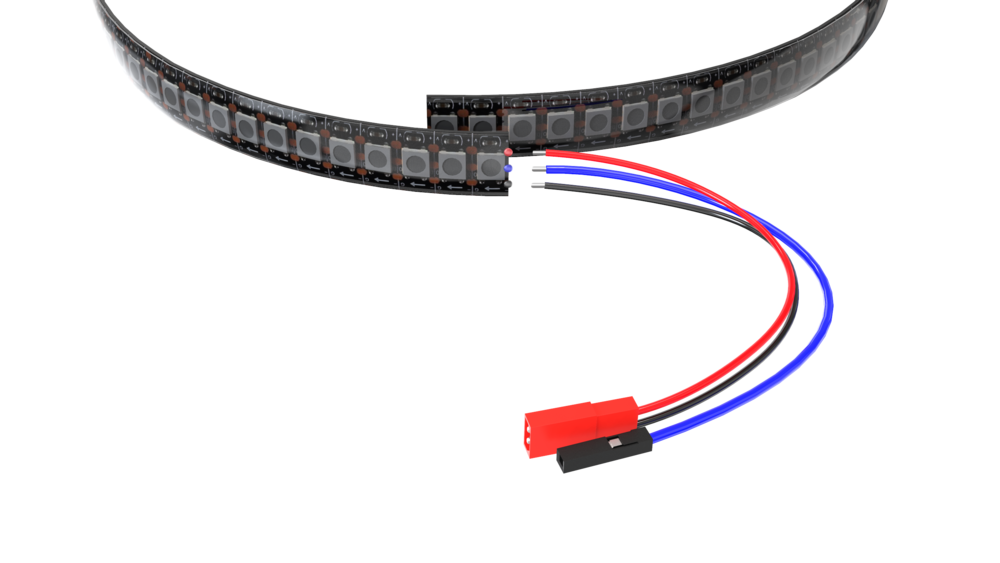
Наклейте светодиодную ленту на обруч, для большей крепкости притяните ее с помощью 3–4 хомутов.
Установите ножки на пластину жесткости с помощью самоконтрящихся гаек и винтов М3х10 используя только крайние монтажные отверстия. Снизу, между пластинами ножек, установите демпферное силиконовое колечко.
Отогните ножки назад и в специальный паз на них установите обруч со светодиодной лентой, таким образом, чтобы кабели подключения выходили с хвостовой стороны коптера.
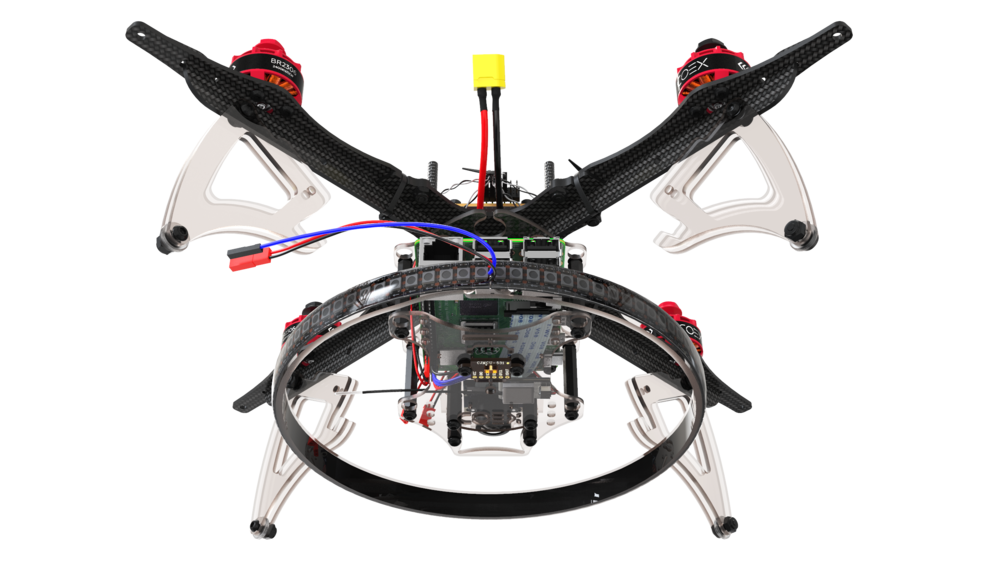
Закрепите ножки с помощью самоконтрящихся гаек и винтов М3х10.
Подключите питание светодиодной ленты в разъем JST 5V на плате распределения питания.
Подключите сигнальный выход светодиодной ленты в Raspberry Ri, к пину GPIO21.
Установите монтажную деку и закрепите ее винтами М3х8.
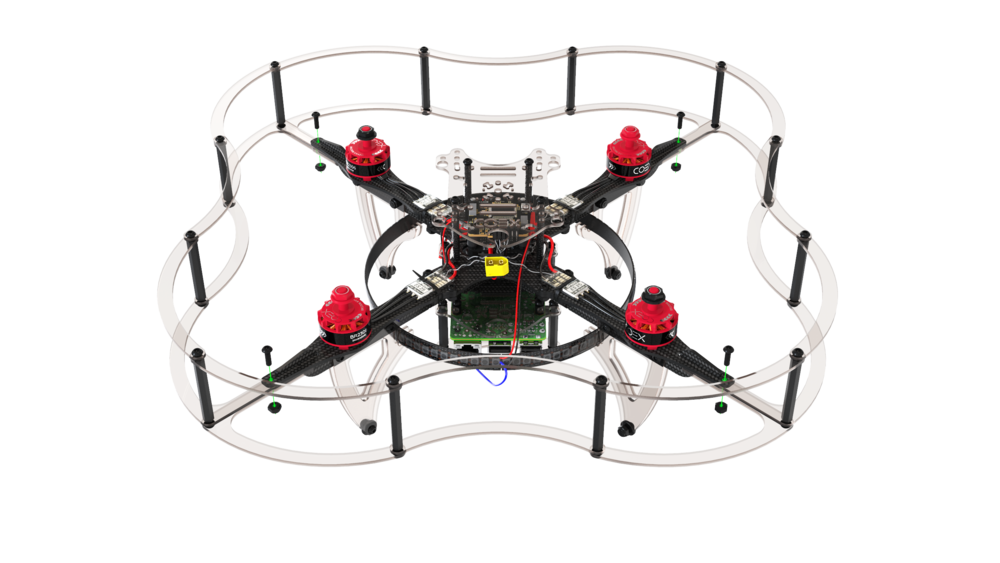
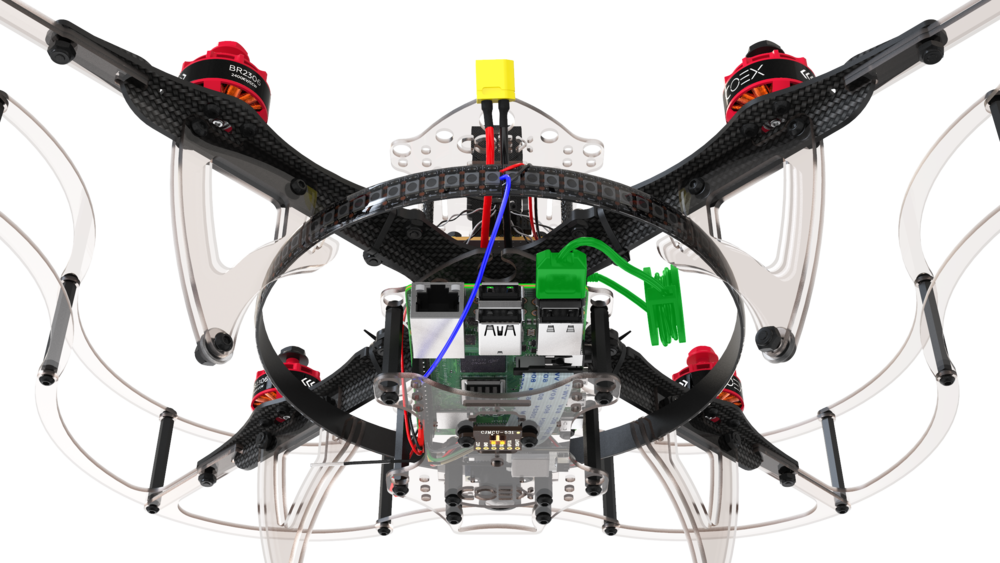
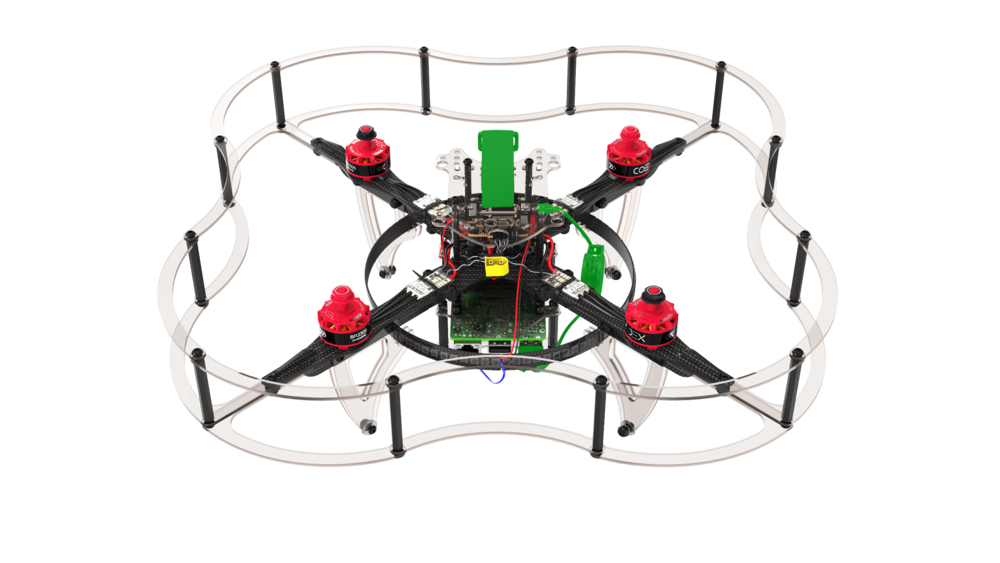
Установка защиты
Соберите нижний уровень защиты с помощью стоек 40 мм и винтов М3х10.
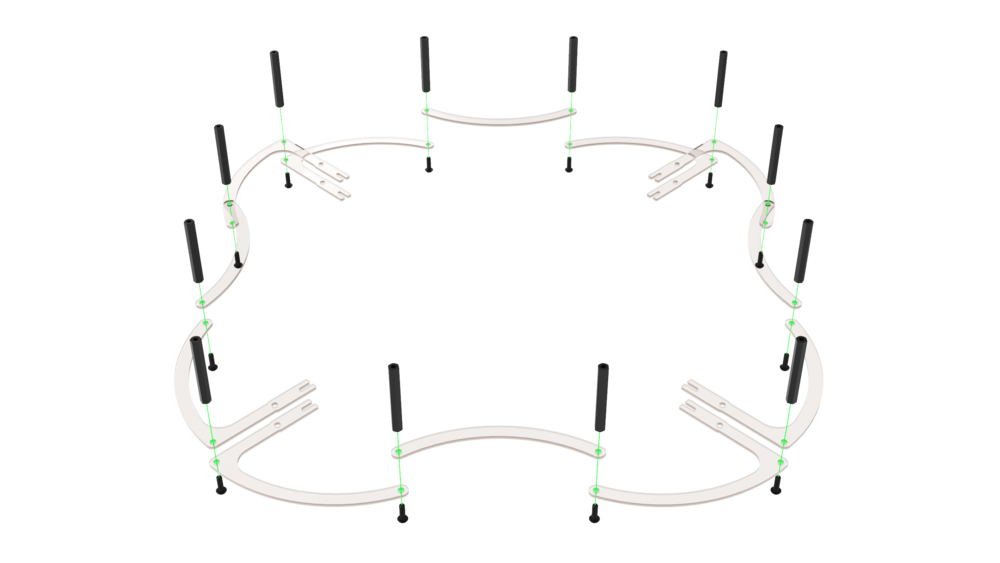
Соберите верхний уровень защиты с помощью винтов М3х10.
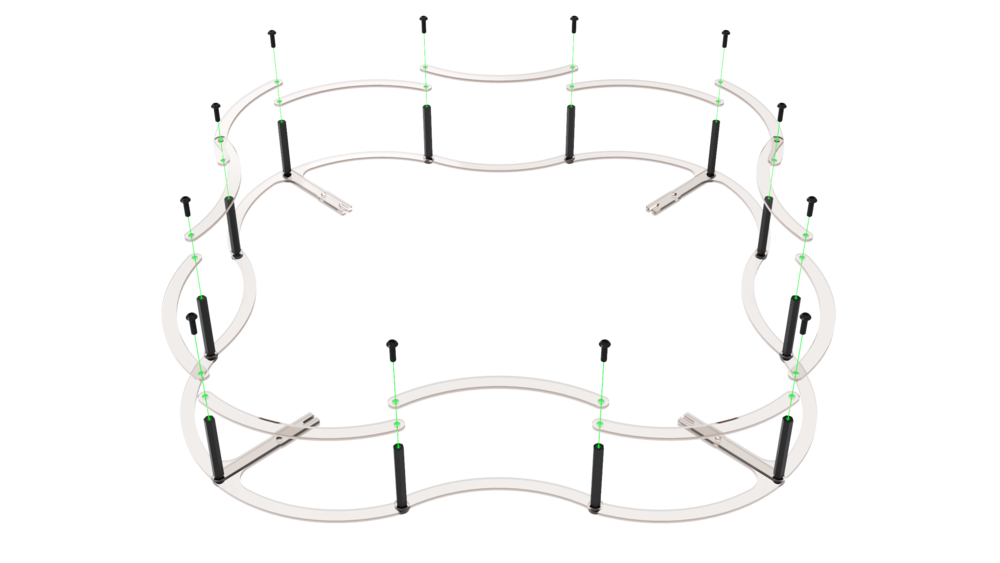
Установите защиту и закрепите на лучах с помощью самоконтрящихся гаек и винтов М3х10.
Подключите полетный контролер к Raspberry Pi с помощью USB к кабеля.
Установите ремешок для крепления АКБ.
СОВЕТ
Дрон собран, далее произведите настройку.