Copter Hack 2019
Хакатон Copter Hack 2019 проходит 11–13 октября в Технополисе "Москва".
Официальный сайт: https://ru.coex.tech/copterhack.
Чат хакатона: https://t.me/CopterHack.
Timepad: https://copterexpress.timepad.ru/event/1017592/.
Информация для участников
Особенности настройки полетного контроллера COEX PIX
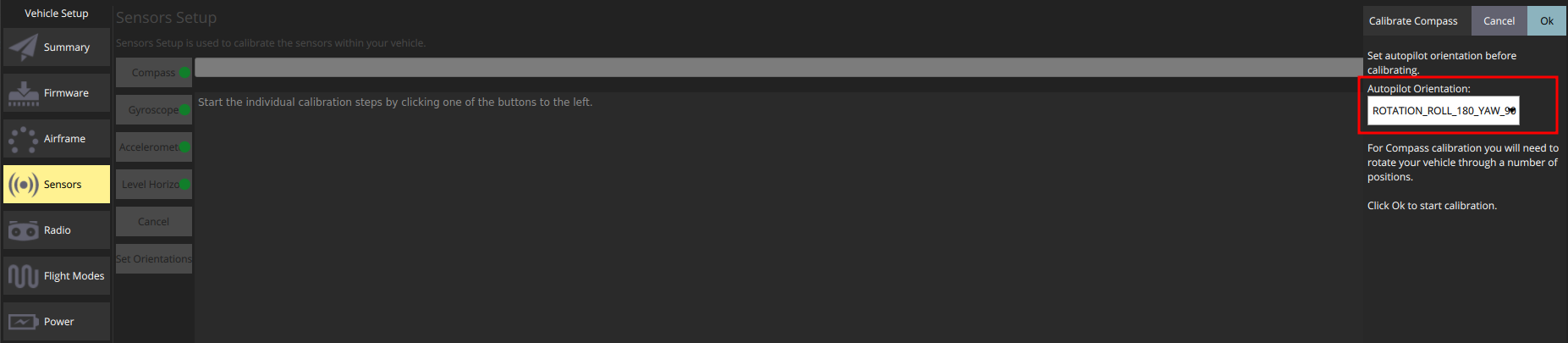
При использовании полетного контроллера COEX Pix перед калибровкой датчиков вам стоит обратить внимание, что в графе Autopilot orientation вы должны выбрать параметр ROTATION_ROLL_180_YAW_90. Данную настройку требуется проводить при калибровке каждого из датчиков.
Этот параметр устанавливается для того, чтобы на программном уровне настроить ориентацию вашего IMU датчика находящегося на полетном контроллере.
Рекомендуемая версия образа
Для Raspberry Pi версий до 3B+: v0.18
Для Raspberry Pi версии 4: v0.19-alpha.1
Ориентация камеры
На многих дронах камера ориентирована шлейфом вперёд. Это следует отразить в файле main_camera.launch в пакете clever.
Подробнее см. статью Ориентация камеры.
Полет с использованием Optical Flow
Для включения optical flow установите параметры optical_flow и rangefinder_vl53l1x в файле clever.launch в true.
Также необходимо в QGroundControl в параметре LPE_FUSION включить галочку pub agl as lpos down.
Необходимо также убедиться, что лазерный дальномер корректно установлен и работает (см. конфигурирование дальномера).
Подробнее: Использование Optical Flow.
Использование карты маркеров
Для настройки большой карты маркеров используйте карту с названием cmit.txt. Далее используйте инструкцию.
Аккумуляторы
При полетах обязательно использование датчика напряжения ("пищалки"). В случае выхода из строя аккумулятора новый не предоставляется!
Съемка видео
Снимайте ВСЕ ваши полеты на видео! В случае поломки дрона на защите сможете показать видео, что будет учтено при оценке.
Проблема с yaw
При полете по маркерам (VPE) в прошивке v1.8.2-clever.7 возможно есть ошибка, которая проявляется в том, что дрон не держит yaw по маркерам. Если у вас есть такая проблема, попробуйте залить более старую прошивку v1.8.2-clever.6, доступную по ссылке https://github.com/CopterExpress/Firmware/releases/tag/v1.8.2-clever.6. Для COEX Pix необходимо скачивать файл px4fmu-v4_default.px4.
Проблема с navigate
В образе 0.18 обнаружился баг из-за которого дрон может летать по точкам слишком быстро. Если у вас это происходит, поставьте в файле ~/catkin_ws/src/clever/clever/launch/clever.launch параметр nav_from_sp в значение false таким образом:
<!-- simplified offboard control -->
<node name="simple_offboard" pkg="clever" type="simple_offboard" output="screen" clear_params="true">
<param name="reference_frames/body" value="map"/>
<param name="reference_frames/base_link" value="map"/>
<param name="reference_frames/navigate_target" value="map"/>
<param name="reference_frames/navigate_target" value="map"/>
<param name="nav_from_sp" value="false"/>
</node>
Лекции
Лекция 1: введение – https://www.youtube.com/watch?v=cjtmZNuq7z0.
Лекция 2: настройка полетного контроллера – https://www.youtube.com/watch?v=PJNDYFPZQms.
Лекция 3: архитектура полетного контроллера PX4 – https://www.youtube.com/watch?v=_jl7FImq3jk.
Лекция 4: автономные полеты: https://www.youtube.com/watch?v=ThXiNG1IzvI.
См. также другие видео на канале COEX на YouTube: https://www.youtube.com/channel/UCeCu93sLBkcgbIkIC7Jaauw/featured.
Результаты
Команды-победители:
- Бульболет – доставка картошки с помощью умной лебедки.
- Copter don't hurt me – управление дроном с помощью нейроинтерфейса.
- import torch – active track на нейронках.
- Автобот – freeze light через бота ВКонтакте.
- Stardust Crusaders – AR среда симуляции для дронов.