Логи и топики PX4
Для детального анализа поведения прошивки PX4 можно просмотреть полетные логи. Полетные логи представляют собой сообщения в uORB-топиках, записанные в файл с расширением .ulg. Лог-файл можно скачать с помощью QGroundControl по Wi-Fi или USB во вкладке Log Download:
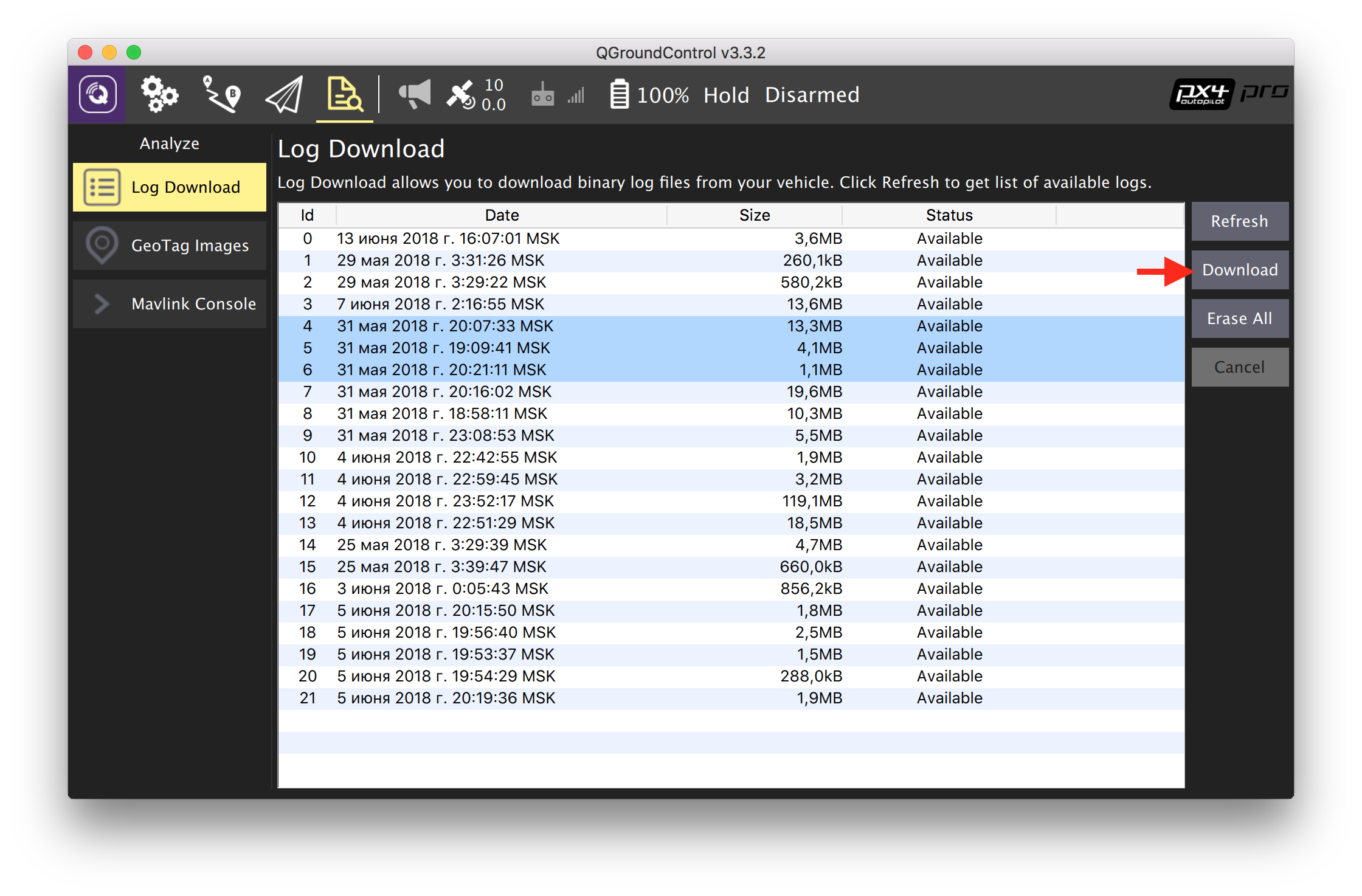
Также необходимые .ulg-файлы можно скопировать непосредственно с MicroSD-карты, находившейся в полетном контроллере.
Анализ
logs.px4.io
Записанные лог-файлы можно загрузить на сайт https://logs.px4.io и анализировать их через веб-интерфейс.
FlightPlot
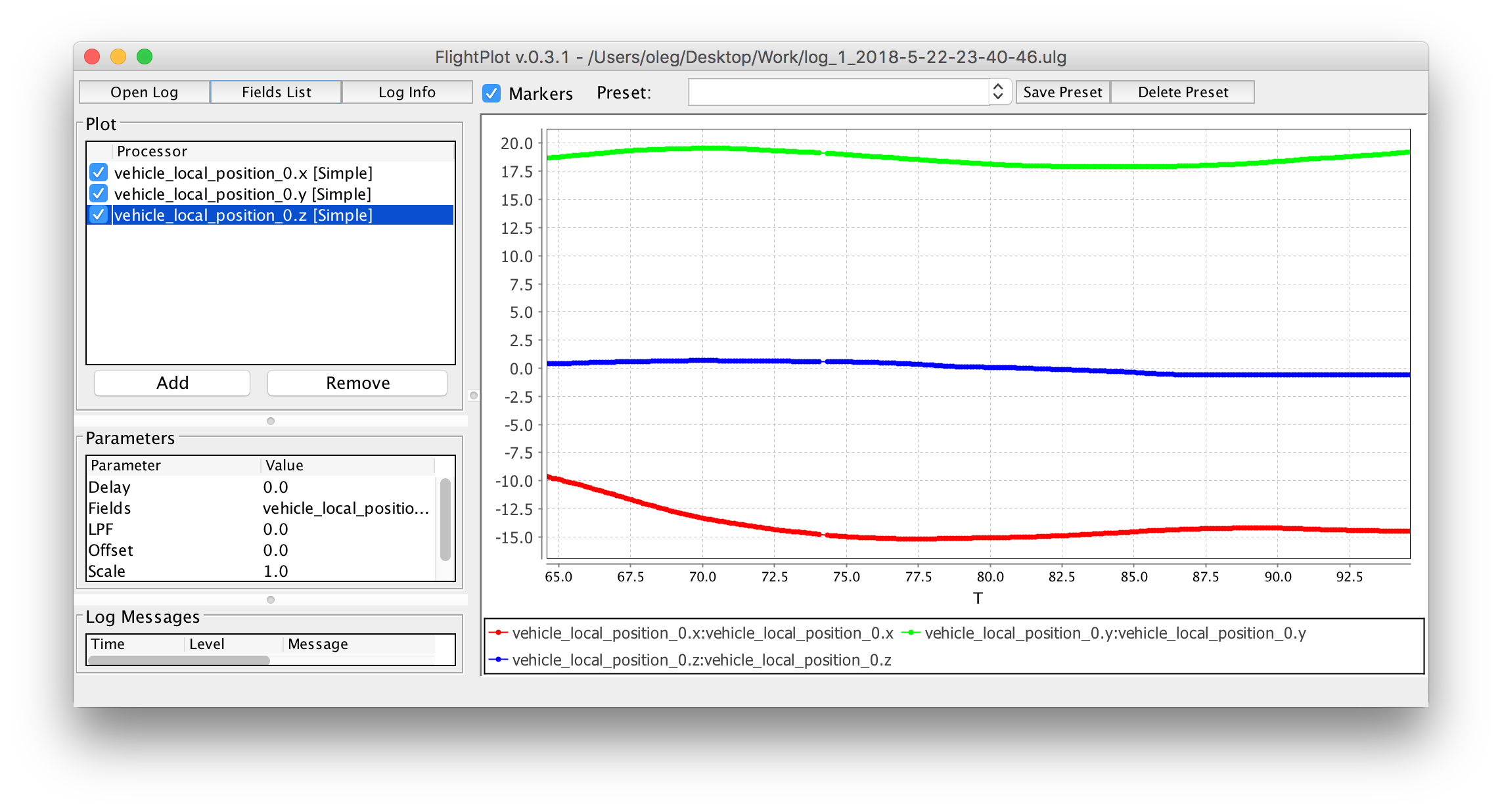
Также лог-файл можно анализировать с помощью программы FlightPlot. Актуальную версию программы можно скачать на GitHub.
В программе можно просмотреть полный список записанных топиков (Fields List). В нем нужно выбрать необходимые топики, после чего они появятся на графике:
Основные топики в PX4
uORB представляет собой pub/sub механизм, аналогичный ROS-топикам, однако сильно упрощенный и подходящий для embedded-среды.
Полный список топиков можно узнать в исходном коде проекта в каталоге msg.
Список некоторых топиков:
- vehicle_status – состояние коптера (режим и т. д.);
- vehicle_local_position – локальная позиция коптера;
- vehicle_attitude – ориентация коптера;
- vehicle_local_position_setpoint – целевая точка (setpoint) коптера по позиции;
- vehicle_global_position – глобальная позиция коптера;
- vehicle_vision_position – полученная визуальная позиция коптера, аналог MAVLink пакета
VISION_POSITION_ESTIMATEили MAVROS-топика/mavros/vision_position_estimate/pose; - att_pos_mocap – полученная MOCAP-позиция коптера, аналог MAVLink пакета
ATT_POS_MOCAPили MAVROS-топика/mavros/mocap/pose; - actuator_controls – сигналы на моторы;
- vehicle_land_detected – статус Land-detector'а;
- optical_flow – данные с модуля optical flow.
Мониторинг топиков в режиме реального времени
Для более новых версий платы Pixhawk (px4fmu-v3), а также для плат Pixracer, в прошивку включен модуль topic_listener, который позволяет просматривать значения топиков в режиме реального времени (в том числе в полете).
Для ее использования нужно выбрать вкладку MAVLink Console в QGroundControl:
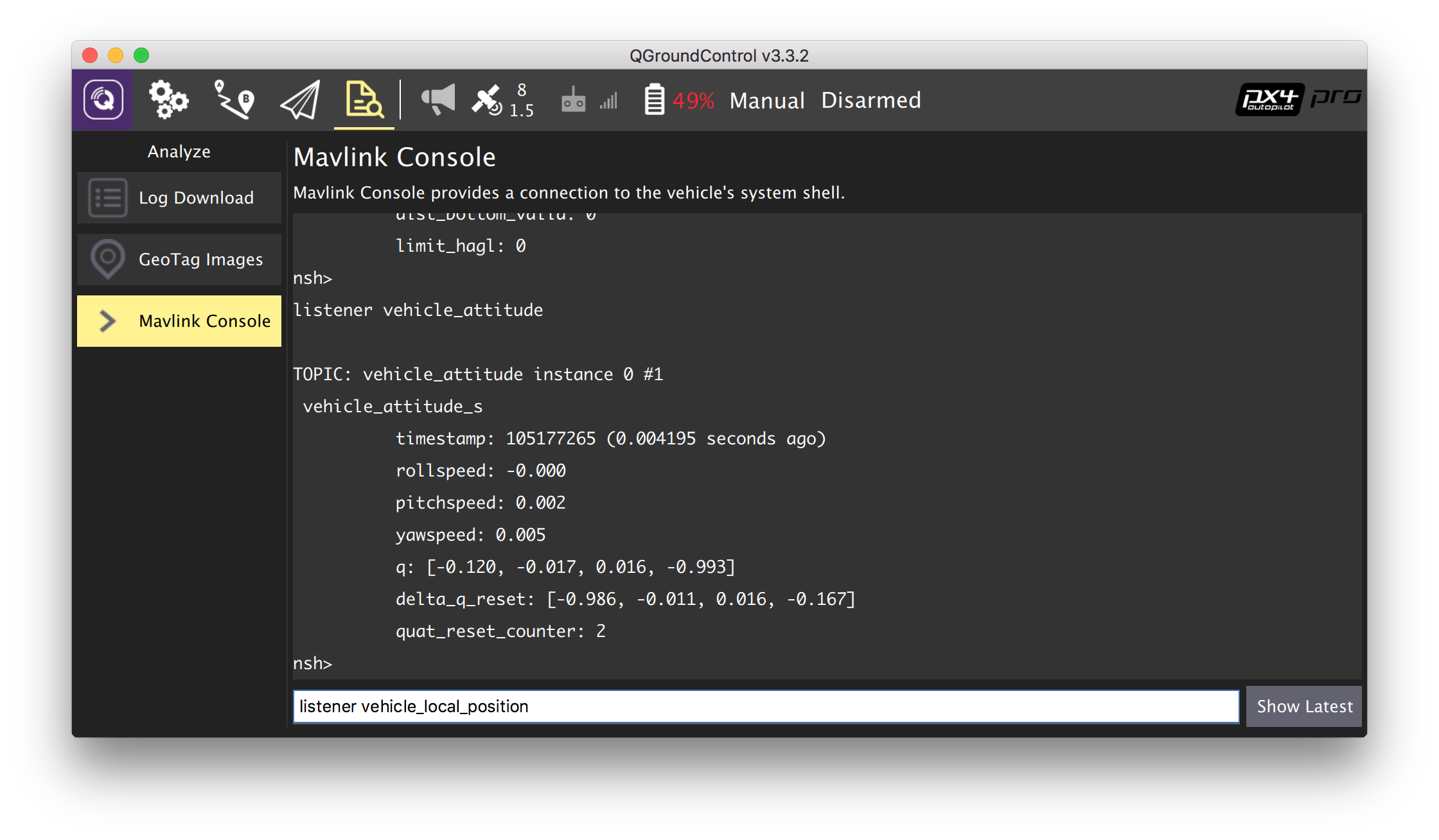
Команда list_topics выводит список топиков, доступных для просмотра (включена только в SITL).
Команда listener <название топика> выводит текущее значение в топике. Существует третий опциональный параметр, который определяет количество сообщений, которые необходимо вывести.
Примеры команд:
listener vehicle_local_position
listener vehicle_attitude 5