Калибровка датчиков
Чтобы откалибровать датчики зайдите во вкладку Vehicle Setup и выберите меню Sensors.
ВНИМАНИЕ
Если вы используете полетный контроллер COEX Pix и он установлен серворазъемами назад (как на изображениях в инструкции), то во всех графах Autopilot Orientation необходимо указать значение ROTATION_ROLL_180_YAW_90, иначе полетный контроллер будет некорректно воспринимать наклоны и повороты коптера.
Компас
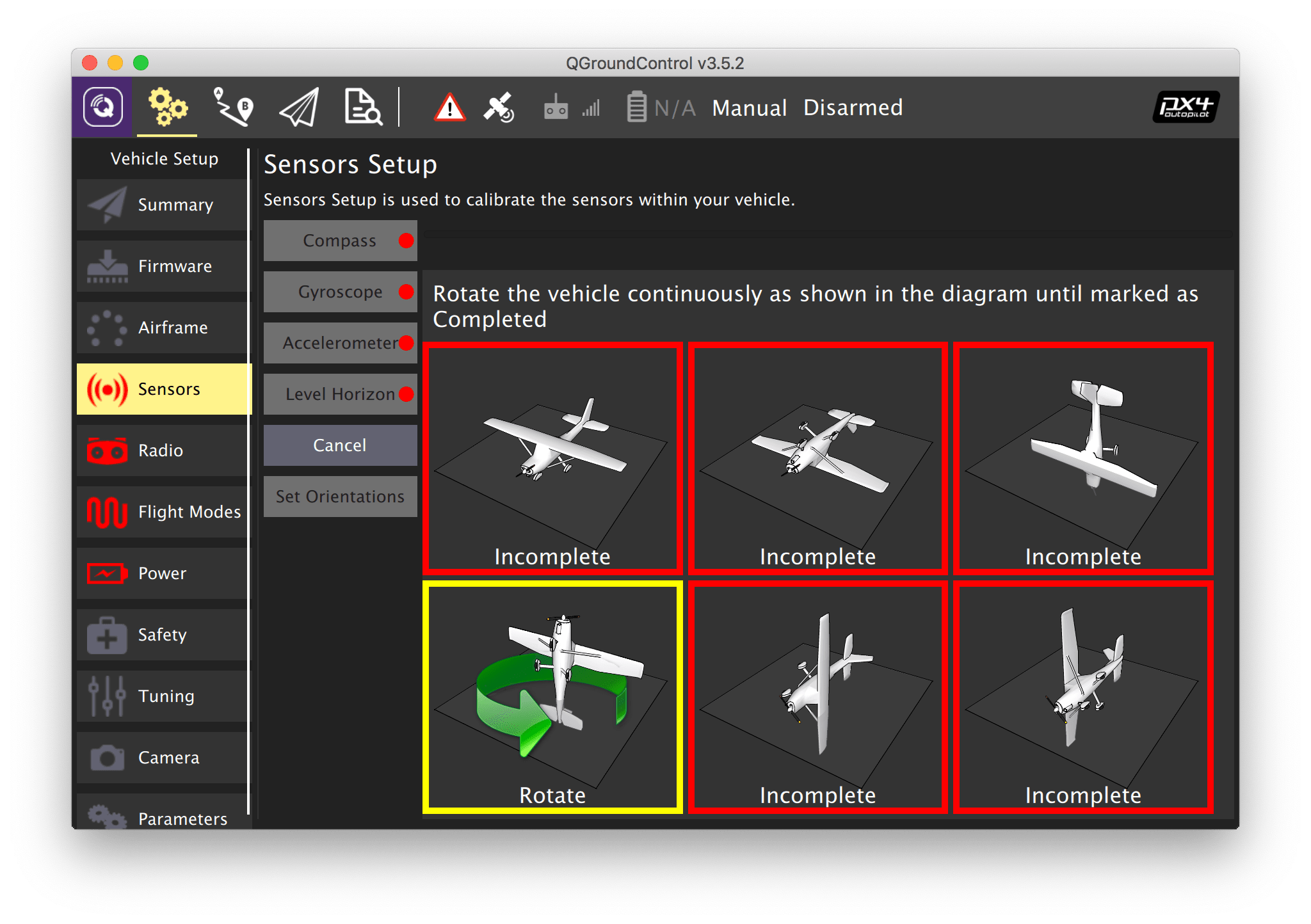
- Выберите меню Compass.
- Выберите ориентацию полетного контроллера – ROTATION_NONE при условии, что полетный контроллер ориентирован передом к носу квадрокоптера.
- Нажмите OK.
- Последовательно устанавливайте квадрокоптер в каждую из указанных ориентаций до появления желтой рамки.
- Вращайте квадрокоптер по направлению стрелки до появления зеленой рамки.
ВНИМАНИЕ
Последние версии прошивки PX4 не поддерживают внутренний компас на полетном контроллере COEX Pix. При появлении ошибки No mags found перейдите во вкладку Parameters, установите параметры SYS_HAS_MAG в 0, EKF2_MAG_TYPE в None и перезагрузите полетный контроллер (Tools => Reboot Vehicle).
Дополнительная информация: https://docs.px4.io/master/en/config/compass.html.
Гироскоп
- Выберите меню Gyroscope
- Установите квадрокоптер на ровную поверхность.
- Нажмите OK.
- Дождитесь окончания калибровки.
ВНИМАНИЕ
Во время калибровки гироскопа квадрокоптер не должен менять своего положения, шататься и т. д.
Дополнительная информация: https://docs.px4.io/master/en/config/gyroscope.html.
Акселерометр
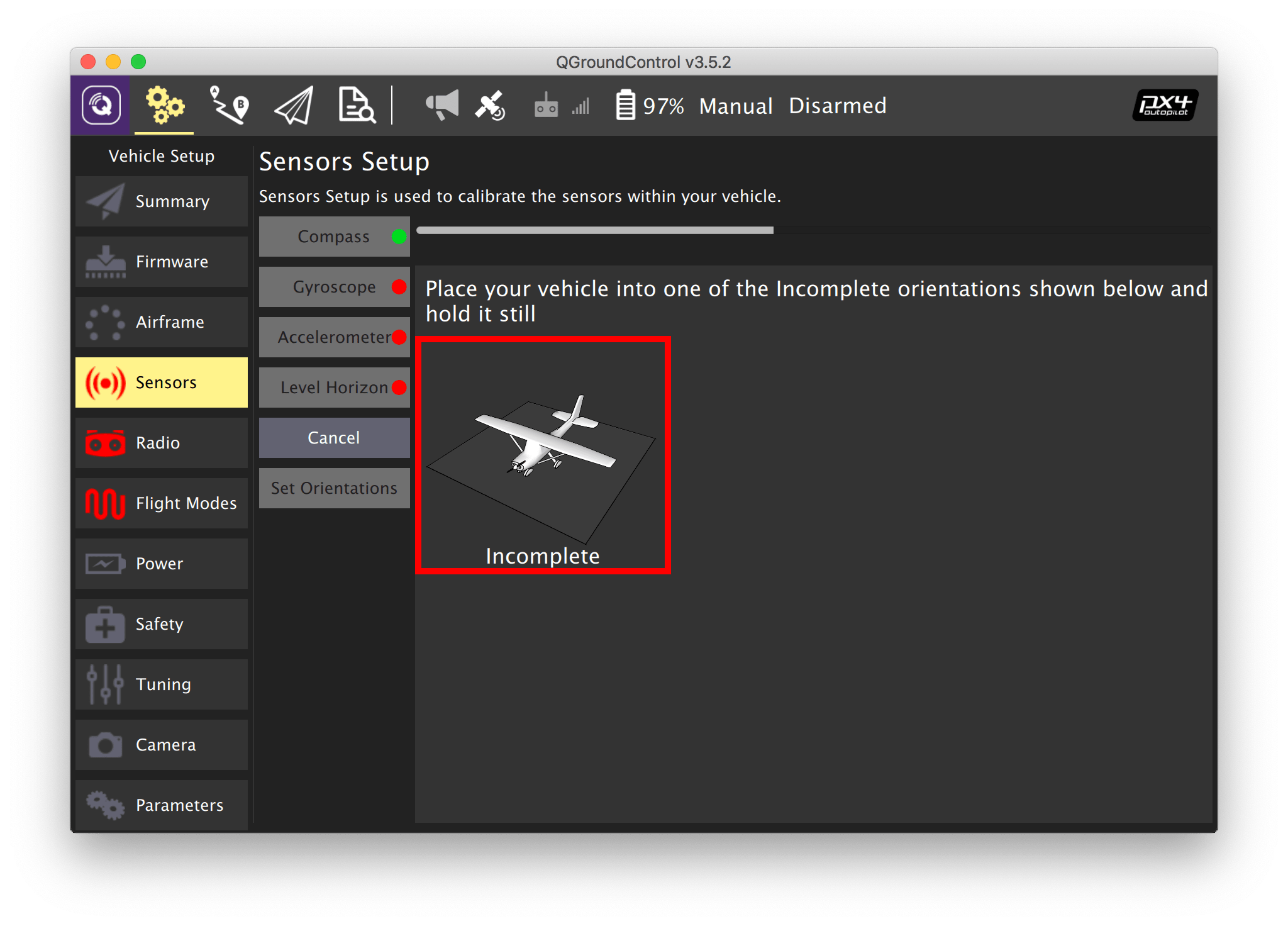
- Выберите меню Accelerometer.
- Выберите ориентацию полетного контроллера – ROTATION_NONE при условии, что полетный контроллер ориентирован передом к носу квадрокоптера.
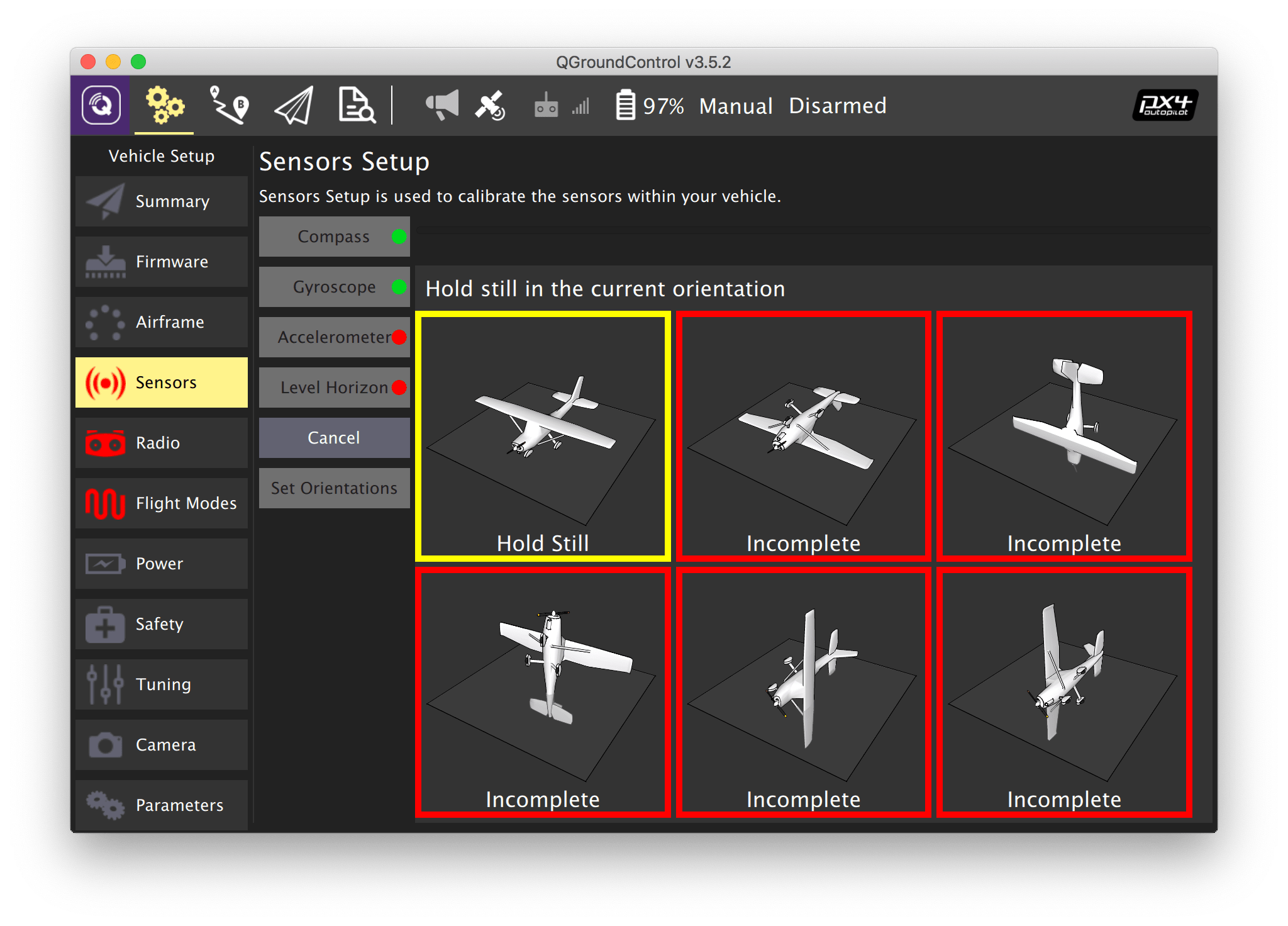
- Последовательно устанавливайте квадрокоптер в каждую из указанных ориентаций до появления желтой рамки.
- Держите квадрокоптер неподвижно до появления зеленой рамки.
Дополнительная информация: https://docs.px4.io/master/en/config/accelerometer.html.
Уровень горизонта
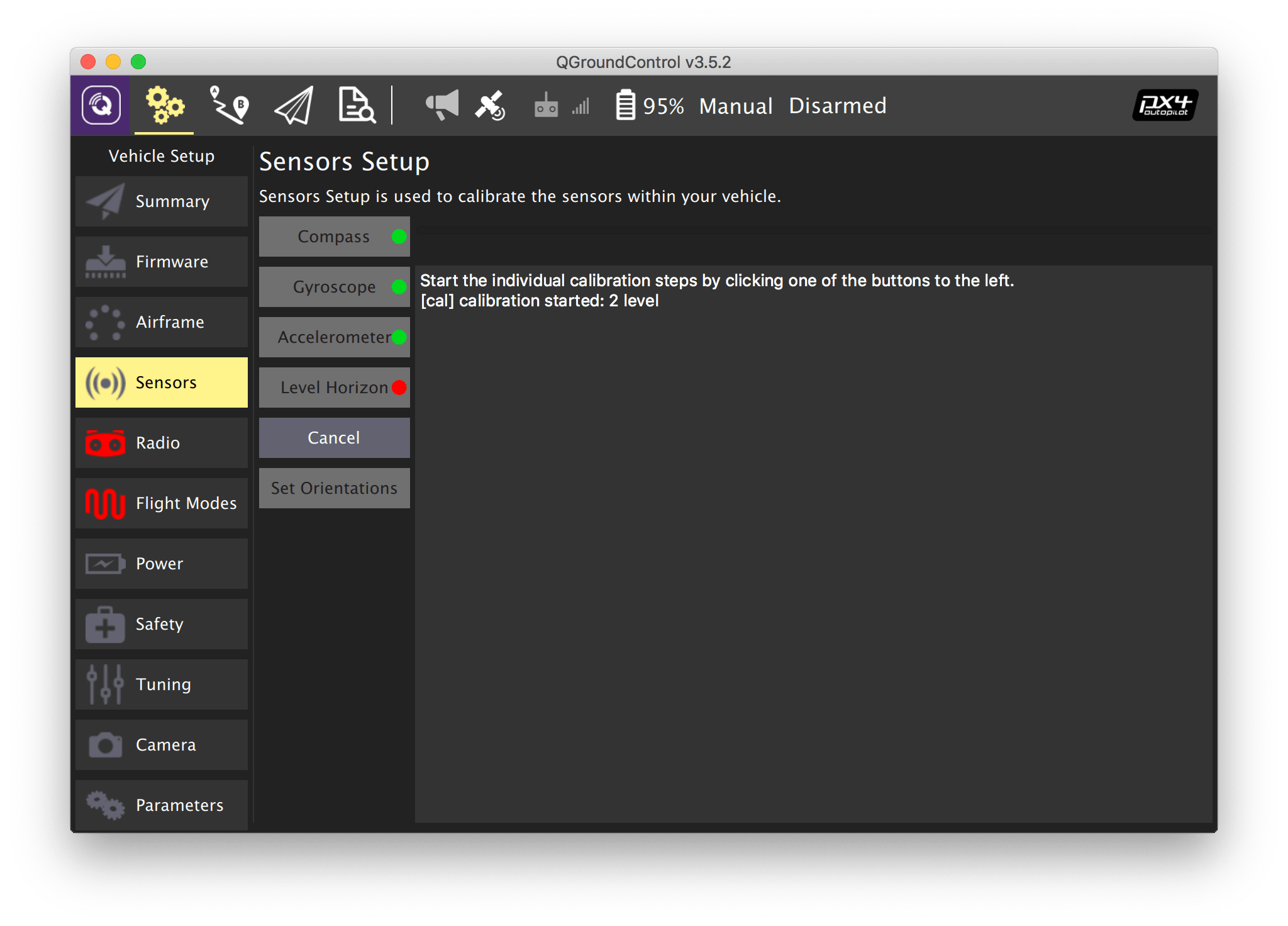
- Выберите меню Level Horizon.
- Выберите ориентацию полетного контроллера – ROTATION_NONE при условии, что полетный контроллер ориентирован передом к носу квадрокоптера.
- Установите квадрокоптер на ровную поверхность.
- Нажмите OK.
- Дождитесь окончания калибровки.
Дополнительная информация: https://docs.px4.io/master/en/config/level_horizon_calibration.html.
Далее: Настройка пульта.