Граффити коптер D-drone
CopterHack-2021, команда AT Makers.
Введение
Люди стремятся научить искусственный интеллект всему, что могут делать сами. Рисовать нас учат с детства. И почему бы не научить дрона рисовать? На данный момент коптеры и граффити набирают свою популярность. Поэтому мы решили совместить их.
Модели и сборка

Для выполнения проекта вам нужно иметь в наличии:
- аэрозольная краска
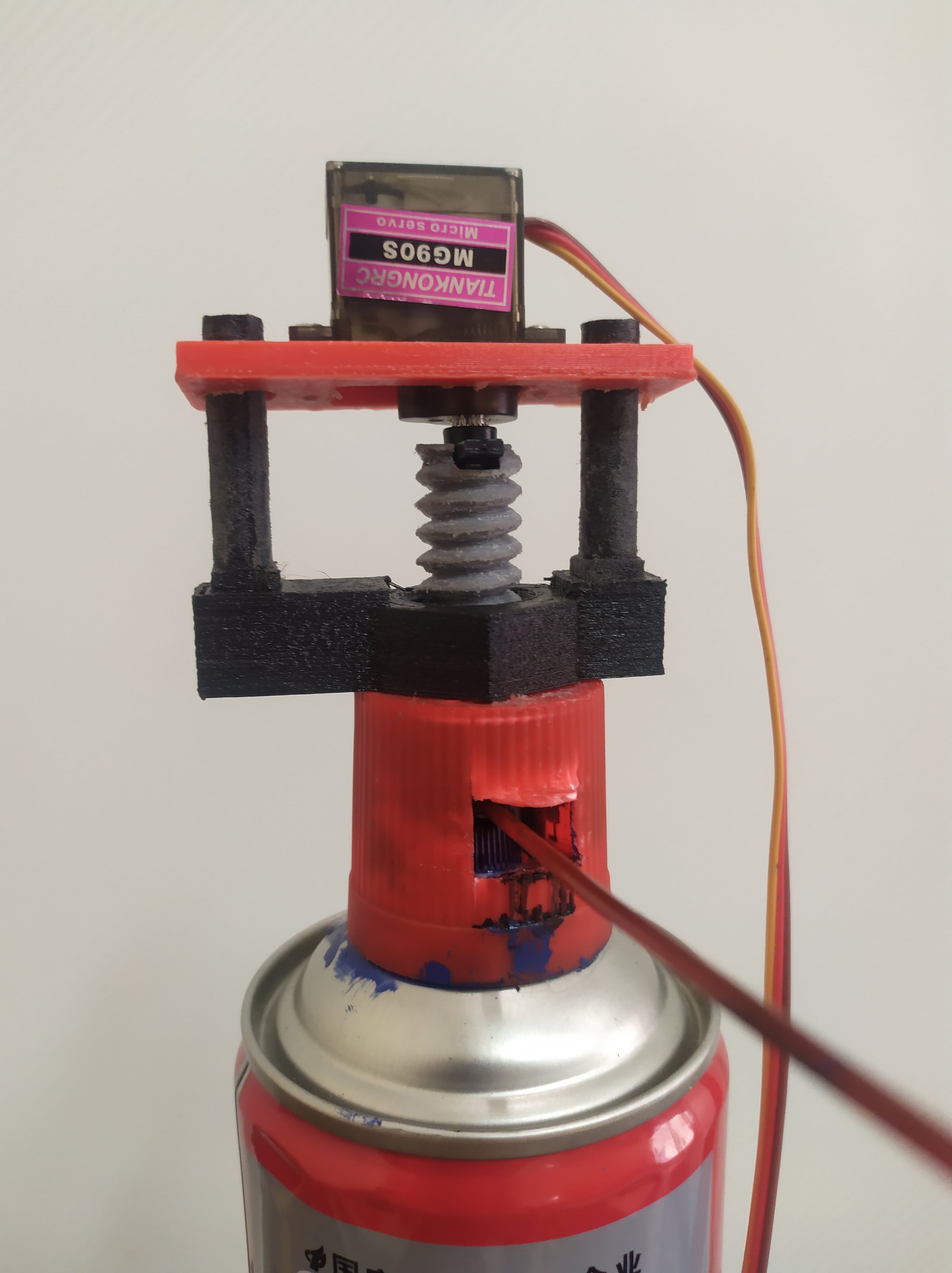
- сервопривод MG90S;
- 3D-принтер;
- удлинитель распылителя;
- лента с липучкой (желательно);
- 4 длинных винта M4 или;
- 2-4 коротких самореза M4 или M3.
Скачать и распечатать детали:
- держатель;
- винт;
- держатель стоек с гайкой;
- стойки (2 шт.);
- держатель для серво.
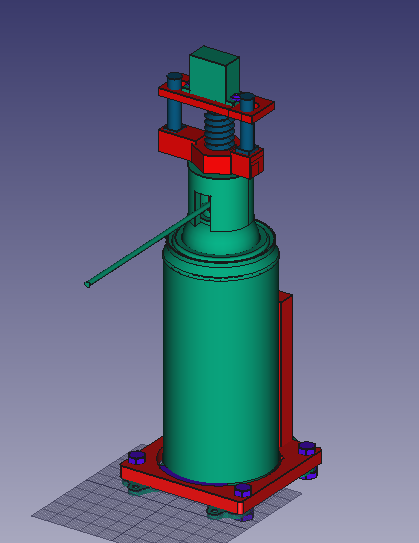
Держатель баллончика. Держатель баллончика прикрепляется к деке 4 винтами и гайками. Чтобы закрепить баллончик к держателю мы использовали ленту с липучкой. С помощью 4 гаек и винтов закрепляем деку с держателем сверху дрона.
Вес держателя: 90 г.
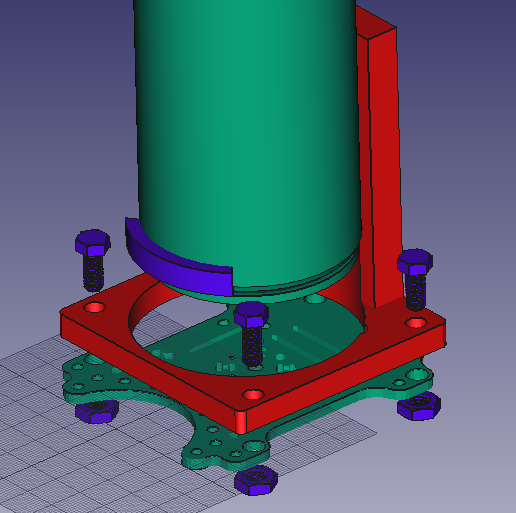
Если диаметр баллончика меньше диаметра держателя, мы используем деталь в виде дуги, размером разницей между ними. Это помогает нам устойчиво закрепить баллончик.
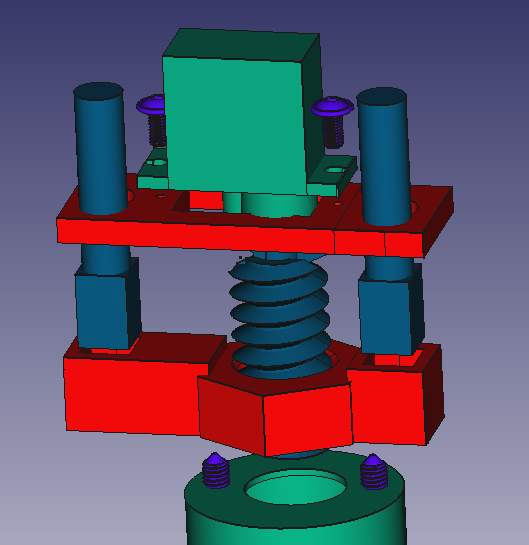
Схема нажатия. Для нажатия клапана будем использовать винтовую передачу с неподвижной гайкой. К сервоприводу будут прикреплена планка с отверстиями, в которых будут входить стойки, закрепленные к гайке. Это помогает сервоприводу двигаться только по одной оси, вверх вниз. Также мы смоделировали крышку для кнопки баллончика, так как поверхность насадки не ровная.
Перед запуском
Настройка работы сервопривода
Перед запуском коптера нужно скачать servo.py и перенести его на RPi. Можно просто скопировать и вставить используя буфер обмена. Или скопировать используя команду scp. Например, так:
scp servo.py pi@192.168.11.1:/home/pi
Затем выполнить удаленно на Raspberry Pi следующие команды:
sudo pigpiod
python servo.py
Настройка веб-интерфейса
Нужно скачать репозиторий в формате .zip. Копируем на RPi и распаковываем с помощью следующих команд:
scp visual_ddrone-master.zip pi@192.168.11.1:/home/pi
cd catkin_ws/src/clover/clover/www
unzip /home/pi/visual_ddrone-master.zip .
mv visual_ddrone-master ddrone
Теперь чтобы открыть веб-интерфейс нужно перейти по ссылке http://192.168.11.1/clover/ddrone.
Веб-интерфейс
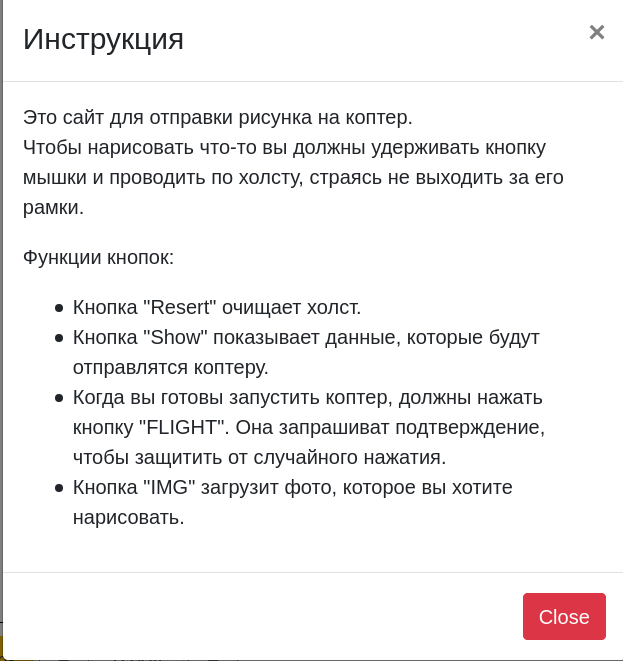
Запуск нашего дрона осуществляется с помощью веб-сайта. Веб-интерфейс позволяет рисовать и кодировать нарисованное в G-code. Данные координат будут переданы для дальнейшей обработки и исполнением коптером.

Мы выбрали веб-интерфейс для управления коптера, потому что он легче и ближе для пользователя.
Полеты
Благодарность
Хотим выразить благодарность Международному университету Ала-Тоо за предоставленную финансовую помощь в осуществлении данного проекта.
