Программируемый летающий автомобиль
Автор: Колмаков Станислав Витальевич.
CopterHack-2021, команда Зауральский викинг. Место работы: ГАНОУ КО «ЦРСК», г. Курган.
В мире широко разрабатываются и применяются новые модели мультироторных беспилотных летательных аппаратов (БПЛА). Самый распространенный и доступный способ знакомства с БПЛА – покупка квадрокоптера в магазине бытовой технике. В таком случае потребитель сможет лишь развить навыки пилотирования и производить аэрофотосъемку. Для получения большего количества навыков и возможностью дополнить квадрокоптер лучше заплатить больше. Речь идет о конструкторах для сборки пилотируемого летательного аппарата.
В ногу со временем идет компания Copter Express (COEX), разрабатывая и модернизируя программируемые квадрокоптеры Clover. Проект летающего автомобиля был разработан на основе программируемого квадрокоптера Clover 4 Code с возможностью двигаться по ровной горизонтальной поверхности, используя колесную базу. Данная возможность позволит расширить функционал использования программируемого квадрокоптера.
Задумка проекта началась с конструирования основы под электронные компоненты на гусеничной базе (рис. 1). В качестве основных компонентов выбрал полетный контроллер COEX Pix и микрокомпьютер Raspberry Pi 3 B+. Используя среду программирования Blockly, получилось привести робота в движение.
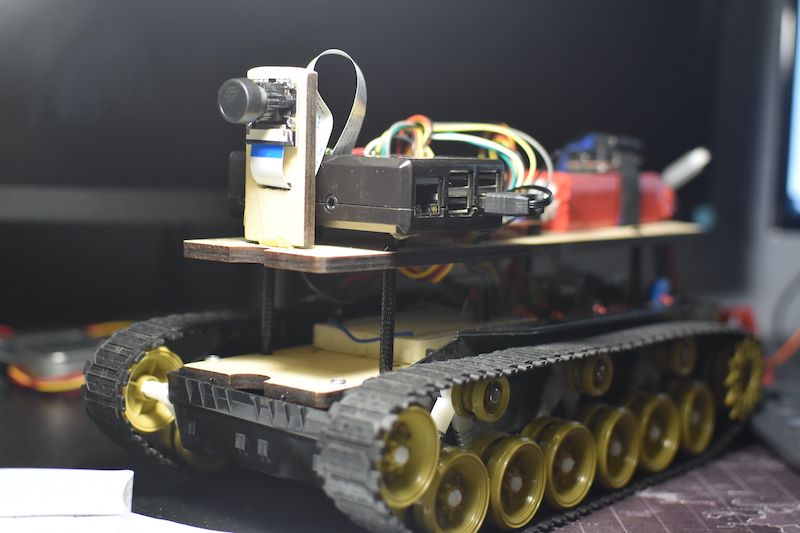
Рис. 1. Гусеничный робот с COEX Pix и Raspberry Pi 3 B+.
Следующим этапом разработки колесной базы для квадрокоптера стало использование конструктора четырехколесной платформы Pirate. Вес платформы с драйвером моторов составил 345 грамм (рис. 2). С учетом увеличения взлетной массы и для увеличения мощности, принято использовать пропеллеры 3-лопастные 6040 (рис. 3).


Рис. 2. Вес платформы. Рис. 3. Собранная конструкция.
Для облегчения веса двухколесной платформы решено смоделировать и распечатать на 3D-принтере основу для колесной платформы (рис. 4), используя PETG пластик. Данный пластик обладает более высокими прочностными характеристиками, чем распространенные ABS и PLA пластики.

Рис. 4. Основа из пластика.
Ссылка на модель: https://drive.google.com/file/d/1_KPZfldSXNGiHbgnVBgMle-JvKtcDZHm/view?usp=sharing.
Платформа содержит: крепления под мотор-редукторы, отверстия для лазерного дальномера и Pi камеру. Также в основе предусмотрены монтажные отверстия для монтажа к квадрокоптеру и облегчения конструкции.
Следующим шагом для снижения веса, стало решение использовать микросхему драйвера двигателей L293D (рис. 5), вместо модуля драйвера двигателей L298N (рис. 6).


Рис. 5. Драйвер двигателей L293D. Рис. 6. Драйвер двигателей L298N.
С учетом всех облегчений, вес летающей машины составил 1 кг (рис. 7).

Рис. 7. Общий вид программируемого летающего автомобиля.
Испытания квадрокоптера, скрещенного с мобильной платформой, доказали работоспособность проекта с возможностью расширенного функционала программируемого квадрокоптера.
Следующим шагом развития проекта станет разработка алгоритмов распознавания линии, цветов и других образов.