Подключение регуляторов 4in1
Распиновка платы регуляторов 4in1
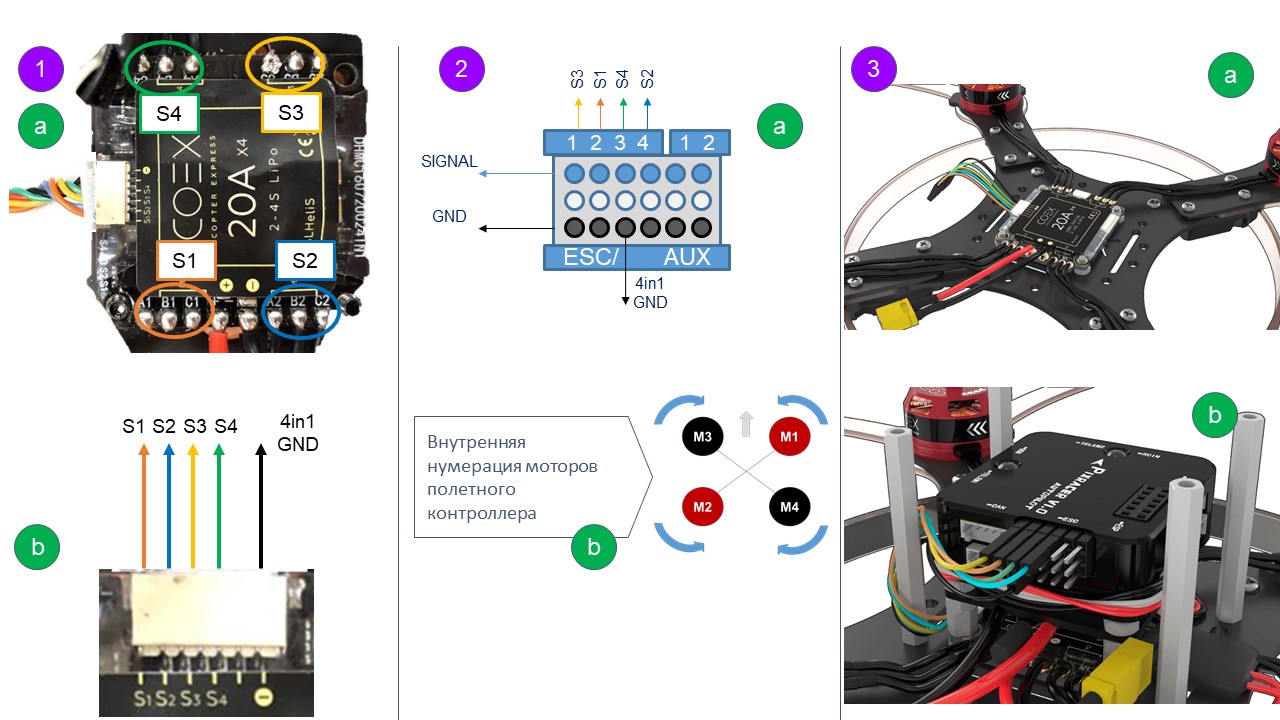
Одним цветом выделены соответствующие фазные провода (рис. 1a) и управляющий ими сигнал (рис. 1b).
Например, оранжевый цвет -> нижний правый мотор -> S1 - оранжевый провода.
Распиновка полетного контроллера Pixracer
На рис. 2a указана распиновка гребенки:
SIGNAL – подключение регуляторов. Каждый пин имеет свой собственный сигнал. На 5 и 6 сигнал можно получать ШИМ сигнал (Например, можно подключить сервопривод).
GND – земля полетного контроллера. Единая шина на всех пинах GND (отмечены черным).
1, 2, 3, 4 – порты для подключения ESC.
1, 2 - порты расширения выходного ШИМ сигнала (настраиваются в QGroundControl, также могут использоваться для управления гексакоптером).
На рис. 2b указана нумерация моторов полетного контроллера Pixracer.
Стрелочка – ориентация полетного контроллера.
Черные M3, M4 – моторы, вращающиеся по часовой стрелке.
Красные M1, M2 – моторы, вращающиеся против часовой стрелке.
Иллюстрация подключения, исходя из текущей ориентации платы регуляторов 4in1
Используя рис. 1a, 1b, 2a, 2b необходимо сопоставить каждому мотору свой сигнал управления и подключить в соответствии с порядком нумерации моторов Pixracer.
Например, мотор М3, вращающийся против часовой стрелки (верхний левый угол) управляется сигналом S4 (зеленый провод). Подключается в порт 3.