Using QGroundControl via Wi-Fi
You can monitor, control, calibrate and configure the flight controller of the quadcopter using QGroundControl via Wi-Fi. This requires connecting to Wi-Fi of the clover-xxxx network.
After that, in the Clover launch-file /home/pi/catkin_ws/src/clover/clover/launch/clover.launch, choose one of the preconfigured bridge modes.
After editing the launch-file, restart the clover service:
sudo systemctl restart clover
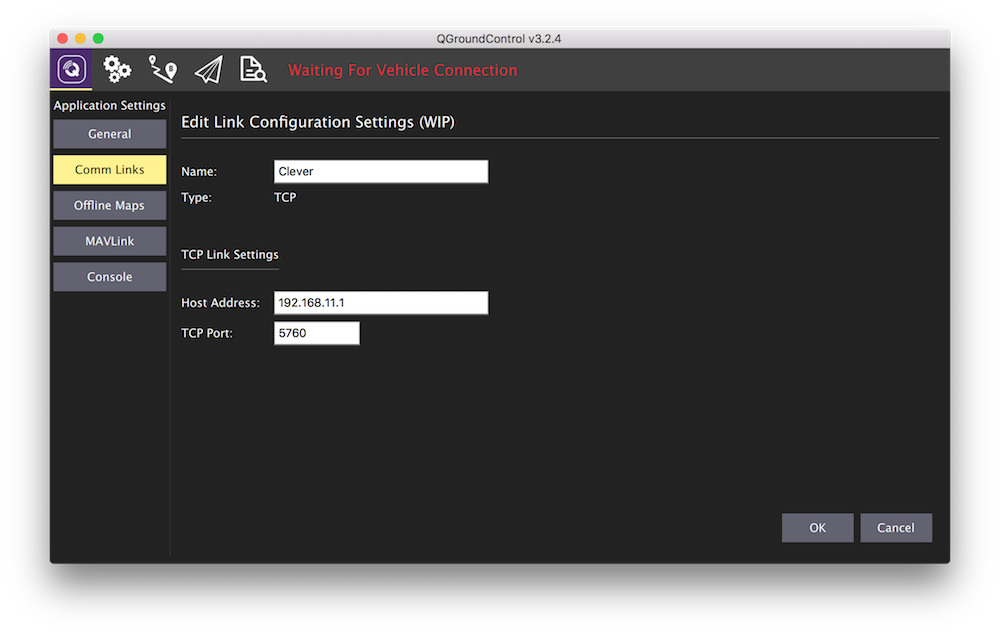
TCP bridge
Change parameter gcs_bridge in the launch file:
<arg name="gcs_bridge" default="tcp"/>
Then in the QGroundControl program, choose Application Settings > Comm Links > Add. Create a connection with the following settings:
Then choose the created connection from the list of connections, and click "Connect".
UDP bridge (with automated connection)
Change parameter gcs_bridge in the launch file:
<arg name="gcs_bridge" default="udp-b"/>
After opening the QGroundControl application, the connection should be established automatically.
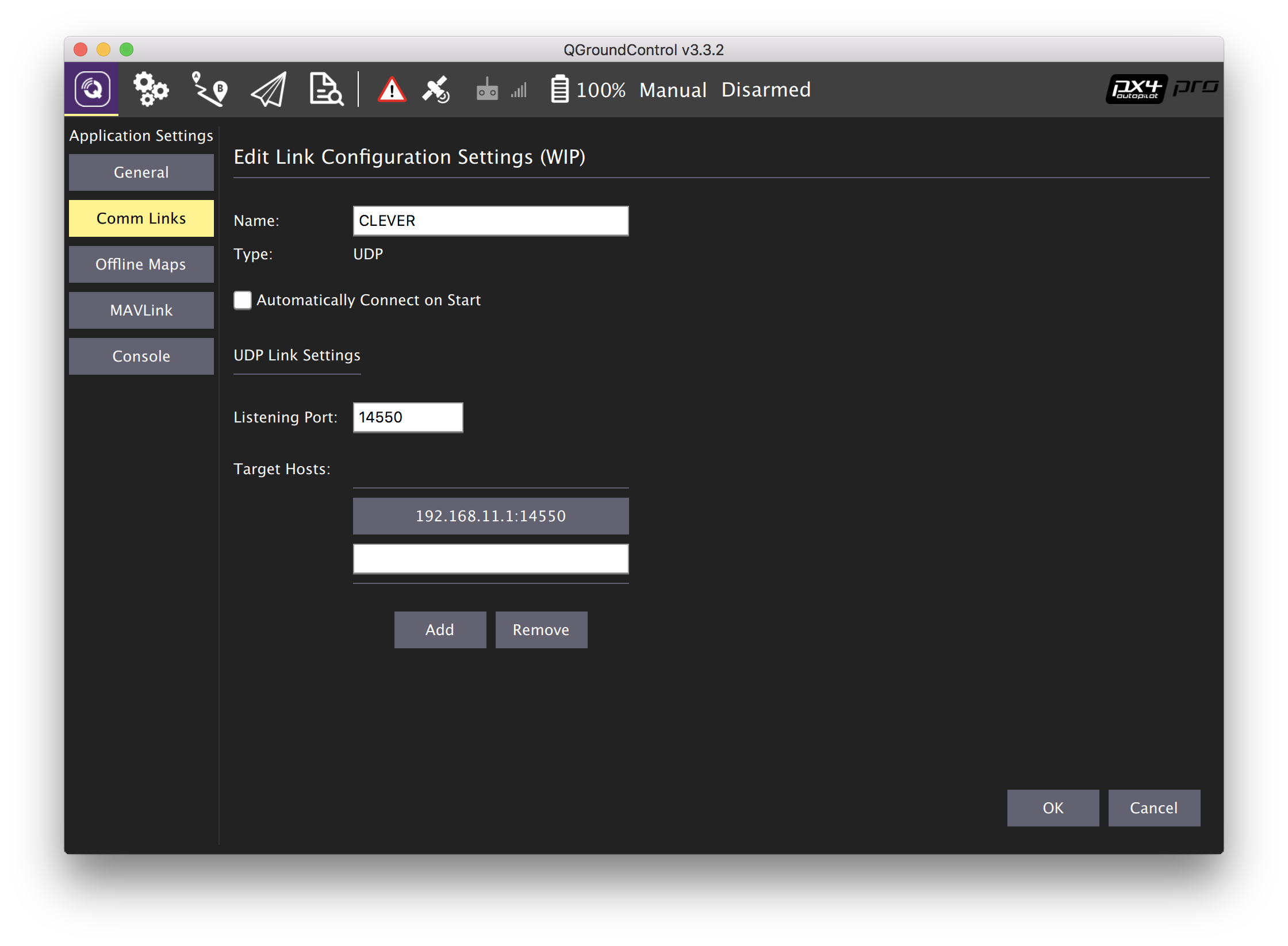
UDP bridge (without automated connection)
Change parameter gcs_bridge in the launch file:
<arg name="gcs_bridge" default="udp-b"/>
Then in the QGroundControl program, choose Application Settings > Comm Links > Add. Create a connection with the following settings:
Then choose the created connection from the list of connections, and click "Connect".
UDP broadcast bridge
TIP
The feature of the UDP broadcast bridge is the ability to view drone telemetry simultaneously from multiple devices (e.g., a phone and a PC). It is also well suited for devices networking using a router.
Change parameter gcs_bridge in the launch file:
<arg name="gcs_bridge" default="udp-b"/>
After opening the QGroundControl application, the connection should be established automatically.
Next: Remote access using SSH