Failsafe configuration
Main article is available at https://docs.px4.io/master/en/config/safety.html.
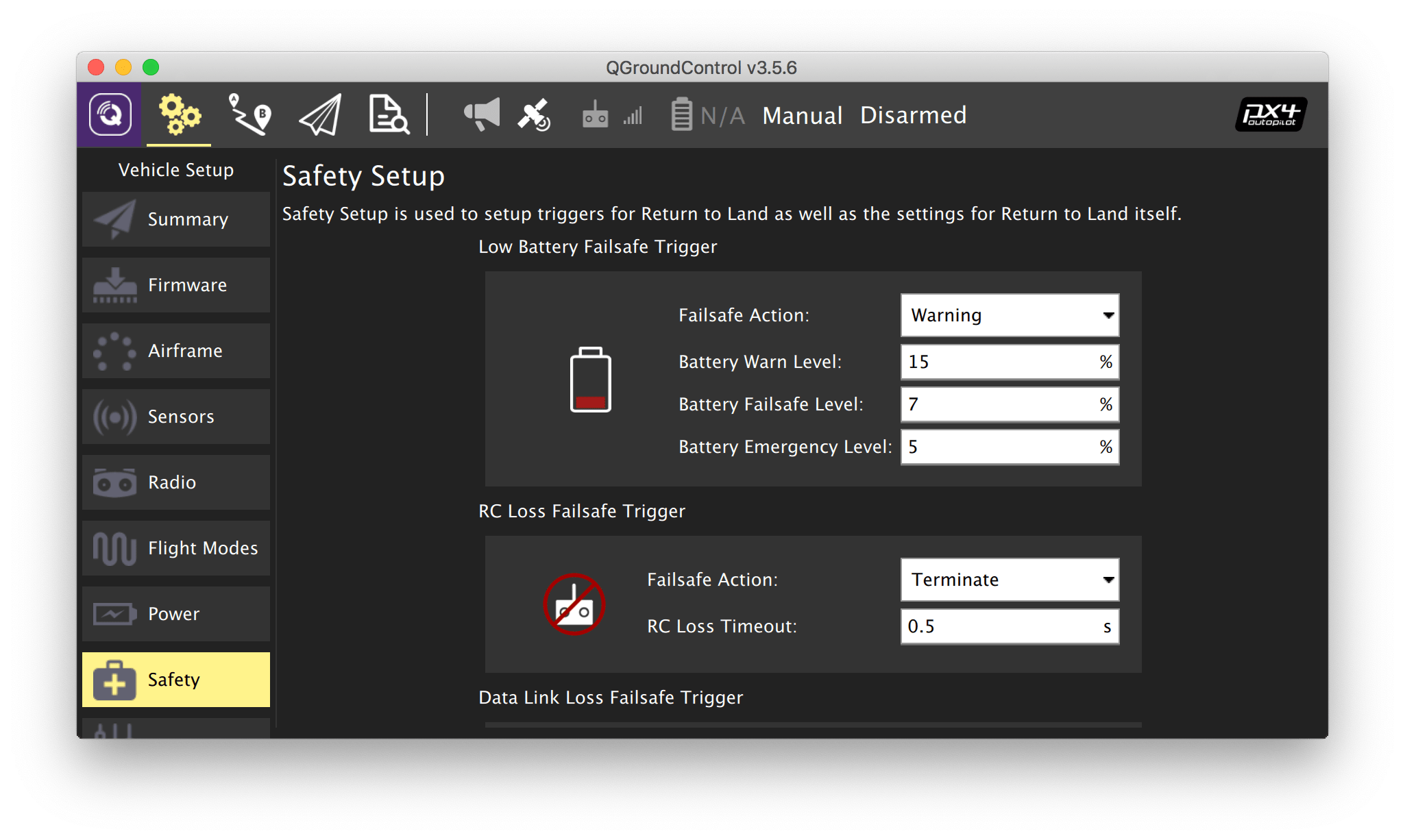
The Safety panel allows you to configure actions that should be performed when a failsafe is triggered. You should at the very least configure the RC Loss failsafe, which is triggered when the RC transmitter link is lost:
- In QGroundControl software, go to the Vehicle Setup panel and choose the Safety menu.
- Select one of the following actions in the RC Loss Failsafe Trigger option:
- Land mode – transition to automatic land mode;
- Terminate – set all outputs to their failsafe values.
- Set the timeout value before RC Loss triggers in the RC Loss Timeout field. We recommend setting it to 2 s.