Automatic check
The RPi image contains a tool for automatic checking the correctness of all the settings and subsystems of the drone – selfcheck.py.
It is generally a good idea to perform this check before flight, especially before an autonomous one.
In order to run it, enter the following command in the Raspberry Pi console:
rosrun clover selfcheck.py
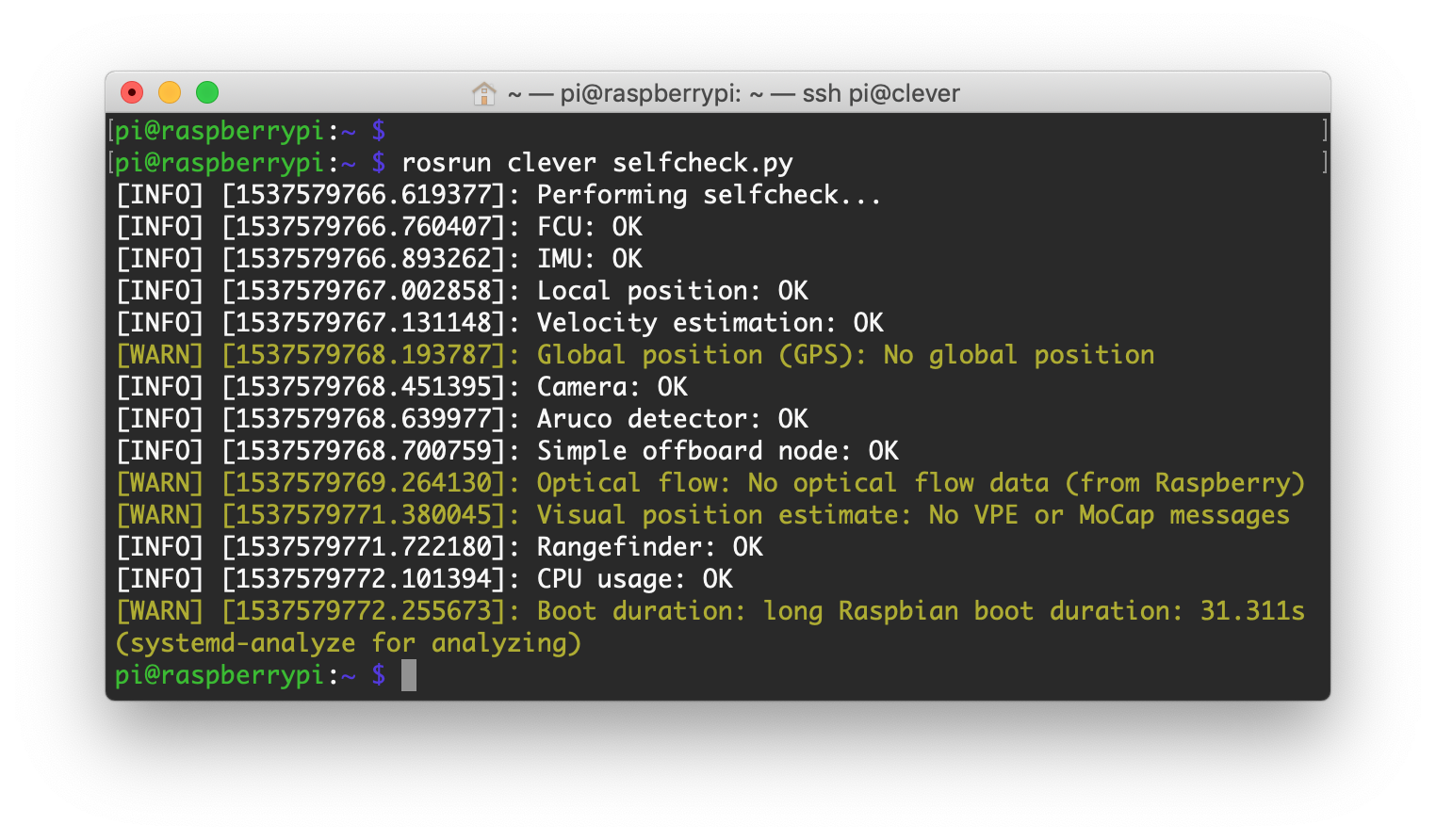
Description of some checks:
- FCU – checks for proper connection with the flight controller;
- IMU – checks whether the data from from IMU is sane;
- Local position – checks presence of local position data;
- Velocity estimation – checks whether drone velocity estimation is sane(autonomous flight is not to be performed if this check fails!);
- Global position (GPS) — checks for presence of global position data (GPS module is required for this check);
- Camera — checks for proper operation of the Raspberry camera.
- ArUco — checks whether ArUco detection is working
- VPE — checks whether VPE data is published.
- Rangefinder — checks whether rangefinder data is published.
- RPi health – checks the onboard computer status.
- CPU usage – checks the CPU load of the onboard computer.
WARNING
Pay attention on the checks marked with WARN sign. If necessary, contact Copter Express technical support.